Deadlock
1 Intro
一方面, lock在共享内存的并发开发中承担了重要角色, 但一方面它也印发了诸多问题: deadlocks(死锁), convoying(锁封护), starvation(饥饿), unfairness(非公平锁), data races(资源争抢). 但其实解决方法也有很多:
- 利用Lock hierarchies(锁层级)来避免deadlock
- 使用deadlock探测工具, 例如: linux的lockdep
- 使用对锁友好的数据结构, 例如: array, hashtable, radix tree
- 利用恰当的synchronization mechanism来避免错误, 例如: reference counters, statistical counters, non-blocking data structures, RCU
2. Reason of Deadlock
当一组thread中每个thread都拥有一把锁, 且同时还在等待被同组thread占有的锁时, 会发生死锁. 本质上即thread与lock之间形成一个环.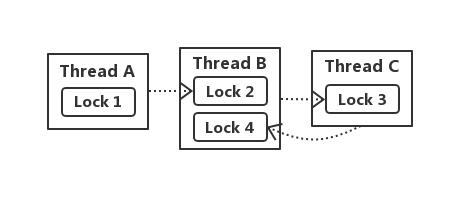
上图中, thread A拥有lock 1且想要获取lock 2, thread B拥有lock 2和lock 4且想获取lock 3, thread C拥有lock 3且想获取lock 4. Thread B, Thread C, lock 3, lock 4之间形成了一个环, 从而导致死锁. 如果没有外部干预, 死锁情况会一直持续.
3. Locking Hierarchies
锁层级目的是让锁的获取按照一定的顺序执行. 例如给每个锁编上数字编号, 若线程没有任何锁, 则可以获得任意编号的锁; 若线程已经拥有锁, 则只能获得比锁编号更高的锁, 不可获得编号相同或更低的锁.
3.1 Local Locking Hierarchies
锁层级的前提是全局性, 因此很难应用于库函数. 因为库函数调用的代码无法获知, 那也就无法遵循锁编号的顺序执行. 绝大多数情况下, 库函数并不会使用到调用者的代码, 这就可以保证库函数内部的锁层级正确执行; 但有时库函数也需要运行调用者的代码, 如qsort():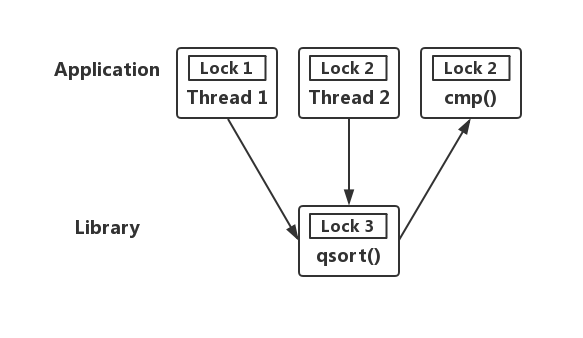
线程1和线程2分别拥有锁1和锁2, 在调用qsort()之前必须拥有锁3, qsort()需要调用外部的cmp()函数, 而cmp()需要锁2. 假设线程1优先获得锁3, 而线程2已经获取了锁2, 这时就会发生deadlock. 虽然依照锁层级, 线程1在拥有锁3后不应去获取锁2, 但qsort()事前不知道锁2的存在, 因此锁层级失效. 为避免这种情况的deadlock, 需要在获取任何未知锁前释放已经获取的锁: 当线程1获取锁3后想要获取外部的锁2时, 应先释放锁3.
3.2 Layered Locking Hierarchies
若库函数无法在获取外部锁时释放内部的所有锁, 这时只能通过将锁分离成不同层来解决. 以上述qsort()为例, 将cmp()的锁剥离为单独一层. 但这通常需要从设计层面上进行改进: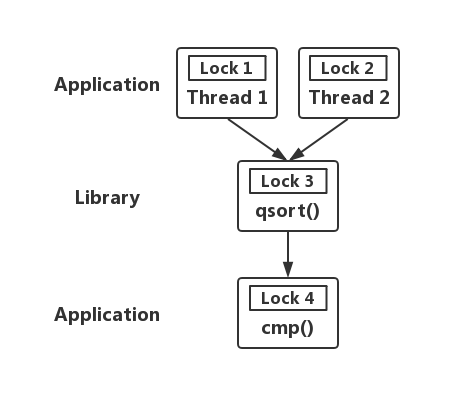
4. Conditional Locking
有时业务逻辑让程序员无法实现锁层级, 例如在网络协议栈中, 报文流双向传输. 当报文从某一层向下一层流动时, 就需要同时获得两层的锁. 由于报文的双向性, 很容易导致死锁. 例如: 报文1从物理层向链路层传输, 其获得了物理层的锁; 报文2从链路层向物理层传输, 获得了链路层的锁, 双方都无法获得对方的锁.
因此应使用spin_trylock()来获取锁, spin_trylock()只会非阻塞性的获取的一次锁, 并立即返回结果(返回0则已获取锁, 返回非0则反之)
/* Thread 1 */ |
5. Acquire Needed Locks First
Conditional Locking需要获取所有必要的锁后才能处理事务, 因此不能为了获取某个锁而释放一个已经获取的锁, 只能释放所有的锁, 然后再获取该锁.
由于无法释放锁的特性, Two-phase locking(两段锁协议)应运而生. Two-phase locking分为两个阶段: 第一阶段期间只获得锁, 不释放锁. 第一阶段结束后应获得所有必要的锁, 从而处理事务. 第二阶段期间只释放锁, 不获取锁. 这种锁协议保证事务处理按照某个顺序执行, 虽然避免了deadlock, 但可能造成livelock.
6. Single-Lock-at-a-Time Designs
Locking Hierarchies和Conditional Locking都是针对嵌套锁的情况来试图避免deadlock, 但如果任何时刻线程只拥有一把锁, 则死锁就无法形成. 例如: 如果可以将事务逻辑完美分割, 每个事务分片只需要一把锁, 特定分片的线程只需获取对应该分片的锁, 这时deadlock就不可能发生.
7. Signal/Interrupt Handlers
由于在signal handler中调用pthread_mutex_lock()是非法, 所以signal handler中的deadlock并不会发生. 但绝大多数的OS kernel都允许在interrupt handler中使用锁. 当需要在interrupt handler中获取锁时, 应阻塞信号或屏蔽中断. 不幸的是, 在一些操作系统里阻塞和解除阻塞信号都属于代价昂贵的操作. 所以出于性能上的考虑, 应用程序和signal handler之间的通信通常使用无锁同步机制.