Consistency and Consensus
分布式系统中会出现很多问题, 最简单的解决方式就是让整个服务失效, 并向用户显示错误信息. 若不能接受这种方法, 则需要容错机制: 即使内部组件出现故障, 服务依然正常运行. 本章将介绍一些用于构建容错分布式系统的算法和协议, 并假设系统会出现任何错误: 网络数据包丢失, 乱序, 重复, 任意延迟, 时钟只能尽可能准确, 节点会暂停运行或随时崩溃.
构建容错分布式系统的最好方式是找到一些保证的通用抽象, 实现它们, 并让应用依赖这些保证. 这一点与事务处理类似: 使用事务的应用可假装没有发生过崩溃(atomicity), 没有其他人同时访问数据库(isolation), 存储设备是完全可靠的(durability). 即使发生崩溃, 竞争条件, 和磁盘错误, 事务抽象也会将错误隐藏起来, 应用也因此无需担心这些问题.
遵循相同的思路, 我们也可将分布式系统中的某些问题隐藏起来. 分布式系统中最重要的抽象为consensus(共识): 让所有节点都对某件事达成一致. 一旦达成共识, 应用就可以利用它实现很多功能. 例如, 单leader复制的数据库中, 当leader崩溃时, 需故障切换到其他节点, 这时剩余节点可通过共识来选举新的leader, 且节点都必须承认该leader; 若两个节点都认为自己是leader, 则会造成脑裂, 从而导致数据丢失.
1. Consistency Guarantees
之前我们讨论过数据库复制中出现的时序问题, 同一时间观察数据库中的两个节点时, 会发现节点间的数据并不一致, 因为写请求无法同时抵达多个节点. 无论数据库复制如何实现(single-leader, multi-leader, leaderless), 都会导致不一致.
绝大多数数据库提供eventual consistency(最终一致性), 这意味着, 如果停止写入并等待一段时间, 所有读请求都会返回相同数据. 换句话说, 不一致是暂时的, 其最终会自我修复(假设网络中的任何故障都会被修复). 最终一致性也可称为convergence(收敛), 因为所有副本最终都会收敛到相同值.
然而这是一种弱保证, 其并没有明确收敛何时完成. 收敛前的读请求可以返回任何数据, 例如, 写入后立刻读取, 返回的值不能保证是刚才写入的值, 因为可能是从其他副本读取.
对于应用开发人员, 最终一致性与单线程程序中变量的行为完全不同. 对于单线程程序, 若对某个变量赋值并立即读取, 不可能读取到旧值, 也不可能读取失败. 表面上我们可以像读取变量一样读取数据库, 但后者拥有更复杂的语义.
使用弱保证的数据库时, 需要时刻意识到其局限性, 不能作出太多假设. 由于应用大部分时间正常运行, 错误往往很微妙且难以测试. 只有系统出现故障(网络中断)或高并发时, 最终一致性的边缘情况才会显现.
本文将选择一些更强一致性的模型, 这些模型代价更高: 可能性能更差, 或容错性更差. 但使用更简单, 所以也很受欢迎. 通过了解不同的一致性模型, 我们可以根据需求来决定使用哪一种模型.
分布式一致性模型与事务隔离级别的层次结构有一些相似之处, 但两者的关注点不同: 事务隔离用于避免并发执行事务中的竞争条件; 分布式一致性用于协调副本间的状态.
2. Linearizability
在最终一致性的数据库中, 同时向两个副本发送相同请求时, 可能得到两个不同值. 那么为何不让数据库给客户端一种只有一个副本的假象? 这样每个客户端都有相同的数据视图, 不必担心复制滞后.
这就是linearizability(线性一致性, 也可称为atomic consistency, strong consistency, immediate consistency)背后的想法. 线性一致性的定义比较模糊, 但其基本思路是让系统中的数据看起来只有一个备份, 所有操作都是原子性的.
在线性一致性的系统中, 只要一个客户端成功写入, 所有客户端都能读取到最新值. 要维持单一副本的假象, 就必须保证读取的值是最新的, 而不是来自陈旧的缓存或副本. 换句话说, 线性一致性是一个新鲜度保证, 以下是一个非线性一致性的系统: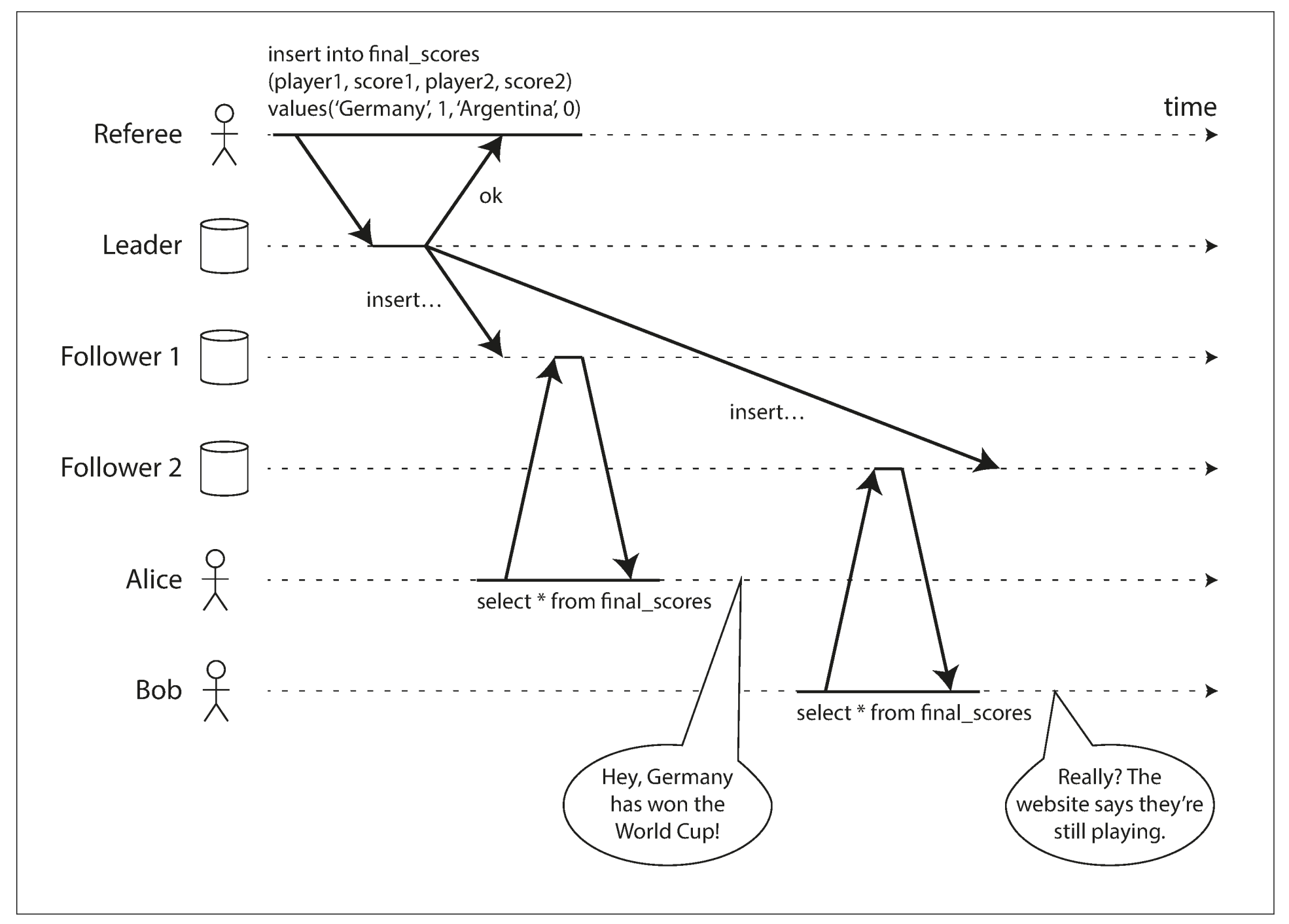
上图中Alice和Bob在同一房间查询世界杯结果. Alice刷新网页并看到结果, 随即告诉Bob; Bob也开始刷新网页, 但请求发送给了落后的数据库副本, 因此显示比赛仍在继续.
若Alice和Bob同时刷新网页, 他们可能看到不同的结果, 因为两个请求是并发的. 但本例中Alice先看到结果, Bob的查询结果至少应与Alice保持相同的新鲜度, 然而Bob得到旧值, 这违背了线性一致性.
2.1 What Makes a System Linearizable?
线性一致性的思想很简单, 但实现中需要考虑很多细节, 为了更好地理解线性一致性需要观察几个例子.
下图展示了线性一致性的数据库中三个客户端同时读写相同的键x. 分布式系统文献中, x称为register(寄存器); 例如, x可以是key-value存储中的一个键, 或关系数据库中的一行, 或文档数据库中的一个文档.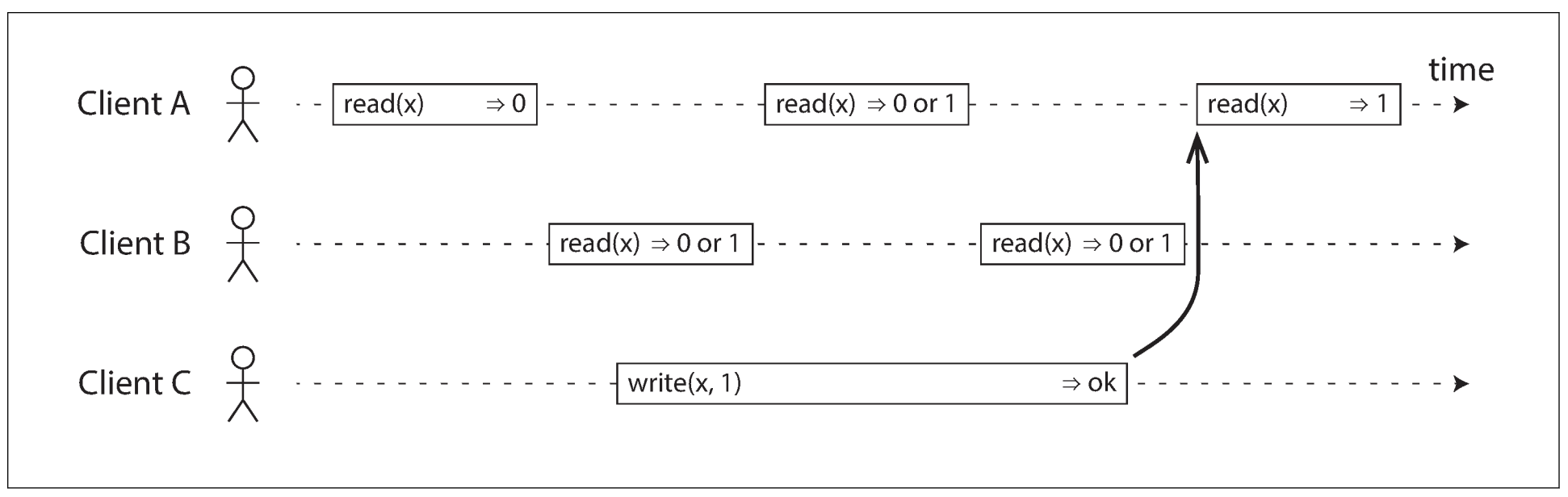
上图只展示了各个客户端请求的视角, 而不是数据库内部的视角. 每个线段都是客户端的一次请求, 线段起点表示客户端发送请求, 终点表示收到响应. 由于存在网络延迟, 客户端并不确定请求何时被处理, 只能确定请求在线段的某个时刻被处理. 该例中, 寄存器有两种类型的操作:
- $read(x) \Rightarrow v$: 客户端请求读取寄存器
x的值, 数据库返回v - $write(x, v) \Rightarrow r$: 客户端请求向寄存器
x写入数值v, 数据库返回r
开始时x = 0, 客户端C发送写入请求(x = 1). 这期间A和B不断从数据库读取数据, 以下是A和B收到的响应:
- A的第一个读请求在写请求完成前开始, 返回旧值0
- A的最后一个读请求在写请求完成后开始, 若数据库为线性一致性, 则返回新值1: 由于写入必然在线段起点和终点之间的某个时刻完成, 若在写入完成后读取, 必然读取到新值
- 若读取与写入在时间上重叠, 则可能返回0或1, 因为无法确定读取时写入是否完成. 这些操作是concurrent(并发的)
然而这些并不足以描述线性一致性: 由于读写并发时, 读取可以看到旧值或新值, 因此写入期间, 读取可能看到旧值和新值来回翻转, 这不符合"单一数据副本"的期望. 为此, 需添加一个新的约束, 如下图: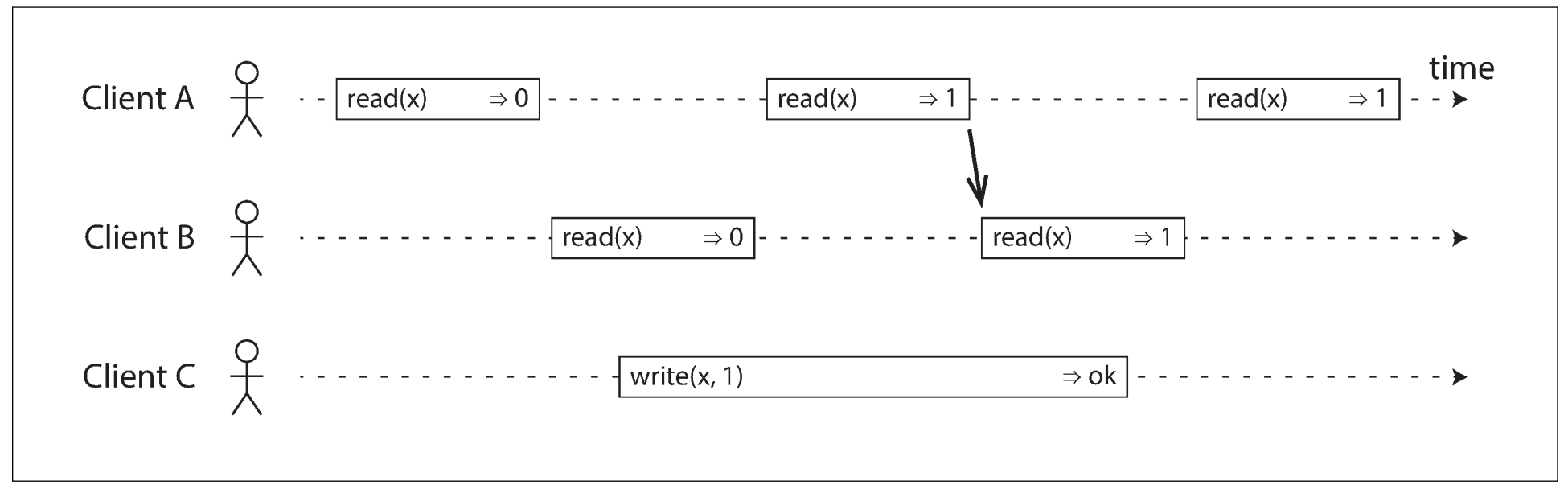
在线性一致性的系统中, 必定存在一个时间点让x从0变为1. 因此, 当一个客户端读取到1时, 后续所有读取都应返回1. 上图的箭头展示了这种时序依赖关系. 客户端A作为第一个读取到1的节点, 后续B的读取也必须得到1, 即使C还未得到回复.
下图为一个更复杂的例子, 展示了每个操作是如何在特定时刻原子性生效的.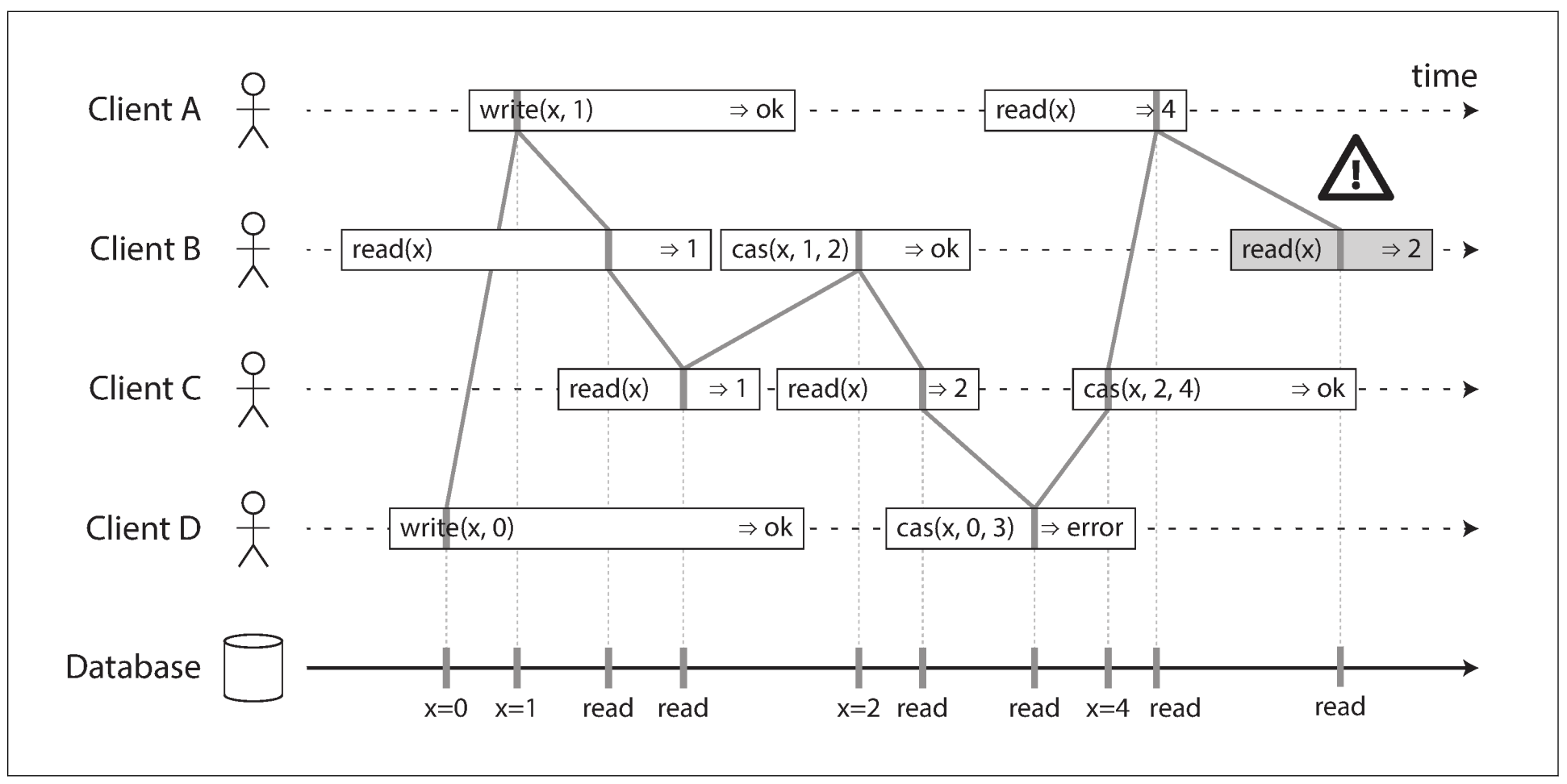
上图新增了一种操作: $cas(x, v_{old}, v_{new}) \Rightarrow r$, 表示客户端请求一个原子性的compare-and-set(比较与设置)操作. 若寄存器x的当前值等于$v_{old}$, 则将其设置$v_{new}$; 若不同, 则返回错误.
上图用竖线表示执行每个操作的时刻(竖线必须在线段内). 这些竖线按顺序连接起来, 其必须是一个有效的寄存器读写顺序(每次读取必须返回最新的写入值).
竖线的连线总是从左向右移动, 而不是从右向左, 这就是线性一致性的要求. 该特性确保了新鲜度保证: 一旦写入或读取新值, 后续所有读取都必须返回新值. 以下是上图中的一些细节:
- B发送读取
x的请求, 之后D发送写请求x = 0, 之后A发送写请求x = 1, 最终B读取到1, 这是合理的: 数据库优先处理D的写入, 然后处理A的写入, 最后处理B的读取. 虽然没有按照发送顺序执行, 但也是可接受的, 因为这三个请求是并发的, B的请求可能遇到网络延迟, 因此数据库最后处理该请求 - B在A收到回复前收到1, 说明写入1的操作已经完成, 这也是合理的: 这并不意味写之前读到值, 只是因为A的响应存在延迟
- 该模型没有任何事务隔离: 客户端随时修改数值. 例如, C读取到1, 之后读取到2, 这是因为B中途进行了修改. 原子性CAS可用于检查数值是否被另一个客户端修改: B和C的cas请求成功, 但D的cas失败(此时
x的数值不为0) - B最后的读取不是线性一致的, 由于A在B之前收到最新值4, 因此B不应收到旧值2
2.2 Relying on Linearizability
线性一致性在什么环境下有用? 对于公布比赛分数, 滞后几秒的比赛结果并不会导致太大问题. 但对于其他领域, 线性一致性是系统的一个重要条件.
2.2.1 Locking and leader election
单leader复制的系统需保证任何时刻只有一个leader. 其中一个选举leader的方式为lock: 每个节点在启动时尝试获得锁, 成功获得锁的节点升级为leader. 无论锁如何实现, 都必须是线性一致性的: 所有节点都承认某个节点获得锁, 否则无效.
Apache ZooKeeper和etcd之类的协调服务通常用于分布式锁和leader选举. 他们使用consensus(共识)算法来实现可容错的线性一致操作. 而Apache Curator则借助ZooKeeper来实现更高级别的服务.
在分布式数据库中, 分布式锁在很多粒度级别上使用. Oracle RAC会为每个磁盘页面使用一个锁, 多个节点共享一个磁盘存储系统的访问权限. 由于线性一致性的锁对于事务执行至关重要, RAC会提供一个专用集群互联网络.
2.2.2 Constraints and uniqueness guarantees
唯一性约束在数据库中很常见, 例如: 用户名或email唯一标识一个用户, 文件路径和文件名标识一个文件. 若想在写入数据时遵循约束, 就需要线性一致性(如, 两个用户同时创建相同路径和文件名的文件, 其中一个返回错误).
该情况与锁类似: 注册账户时, 需先为用户名获得一个锁. 该操作类似于CAS: 若用户名未被使用, 则将用户名赋予当前用户.
若想确保银行余额不为负, 或出售的商品没有超过库存量, 或两个人不会预定同一航线的同一座位, 就要求所有节点同意一个最新值. 实际应用中, 这种约束会被放宽(若航班被超额预定, 则将用户转移到另一条航线并补偿损失), 也就不需要线性一致性.
然而, 一个严格的唯一性约束需要线性一致性; 其他类型的约束(外键或属性约束)则不需要线性一致性.
2.2.3 Cross-channel timing dependencies
对于公布比赛分数的例子, 若Alice没有告诉Bob分数, 则Bob不会知道自己的查询是陈旧的, 只会不断刷新直到看到分数. 由于系统中存在其他信道(Alice告诉Bob), 才会发现违背了线性一致性.
计算机系统中也有类似情况. 假设网站允许用户上传照片, 后台程序会压缩照片以加速下载, 该系统的架构和数据流如下: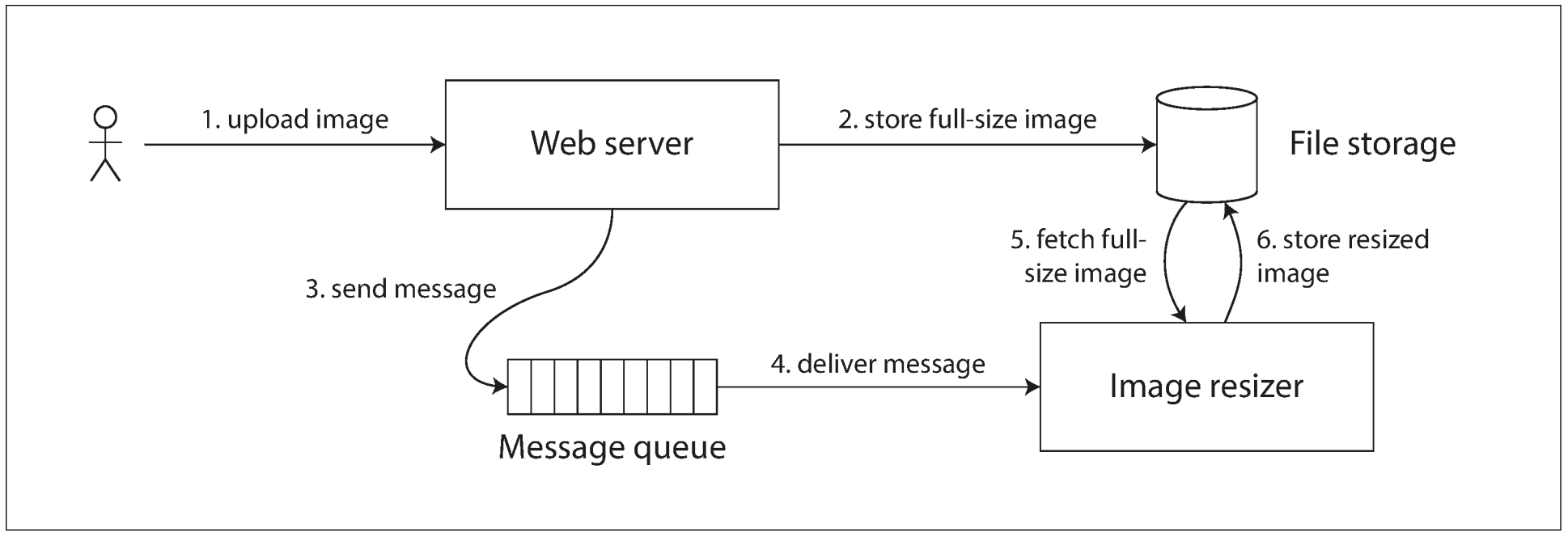
Image resizer负责压缩照片, 指令通过MQ从服务器发向resizer. 服务器不会将整个图片放入MQ, 因为MQ用于短消息的传输, 而一张照片有几兆大小. 因此照片会被写入到文件存储服务, 一旦写入完成, 指令会放入MQ.
若文件存储服务遵循线性一致性, 则一切正常; 但若不遵循线性一致性, 则存在竞争条件: MQ可能比存储服务内部的复制快, 这时resizer会拿到旧照片, 导致数据不一致.
该系统中存在两个信道: 文件存储和MQ. 由于没有线性一致性提供的新鲜度保证, 两个信道间就会出现竞争条件.
线性一致性不是唯一避免竞争条件的方法, 但却是最容易理解的. 若能控制其他信道, 也可避免竞争条件, 但会带来额外的复杂度.
2.3 Implementing Linearizable Systems
线性一致性最简单的实现方法是只保留一个数据副本, 然而这样没有容错性: 若该节点失效, 则数据丢失, 只有等节点恢复才能访问数据. 为实现容错就需要复制. 以下是几种常见的复制方案:
- Single-leader replication: leader持有主副本, follower持有备份副本. 若从leader读取, 或从同步更新的follower读取, 则可能实现线性一致性. 但由于设计(快照隔离)或同步问题, 并不是所有单leader数据库都支持线性一致性.
如果想从leader读取数据, 必须先确定谁是leader. 一个节点认为自己是leader, 但实际上可能并不是. 若让该节点处理读请求, 很可能违反线性一致性. 使用asynchronous replication(异步复制)时, 故障切换可能会丢失已提交的写入, 并违反了持久性和线性一致性. - Consensus algorithms: 共识算法与单leader复制类似. 但共识协议可防止脑裂和陈旧副本. 因此共识算法可实现线性一致性存储, ZooKeeper和etcd就是这么实现的.
- Multi-leader replication: 通常不是线性一致性的, 因为允许同时写入多个节点, 并异步复制到其他节点. 由于没有单一数据副本, 需要处理写入冲突.
- Leaderless replication: 可实现强一致性, 但取决于法定人数的具体配置, 还有如何定义强一致性. 基于日历时钟的LWW(最后写入胜利)冲突解决方法几乎是非线性一致性的, 由于存在时钟偏差, 无法保证事件顺序与时间戳一直. 宽松的法定人数也会破坏线性一致性; 即使是严格的法定人数, 也可能违反线性一致性.
2.3.1 Linearizability and quorums
在Dynamo风格的模型中, 严格的法定人数读写看起来满足线性一致性. 但出现网络延迟时, 可能出现竞争条件, 如下图: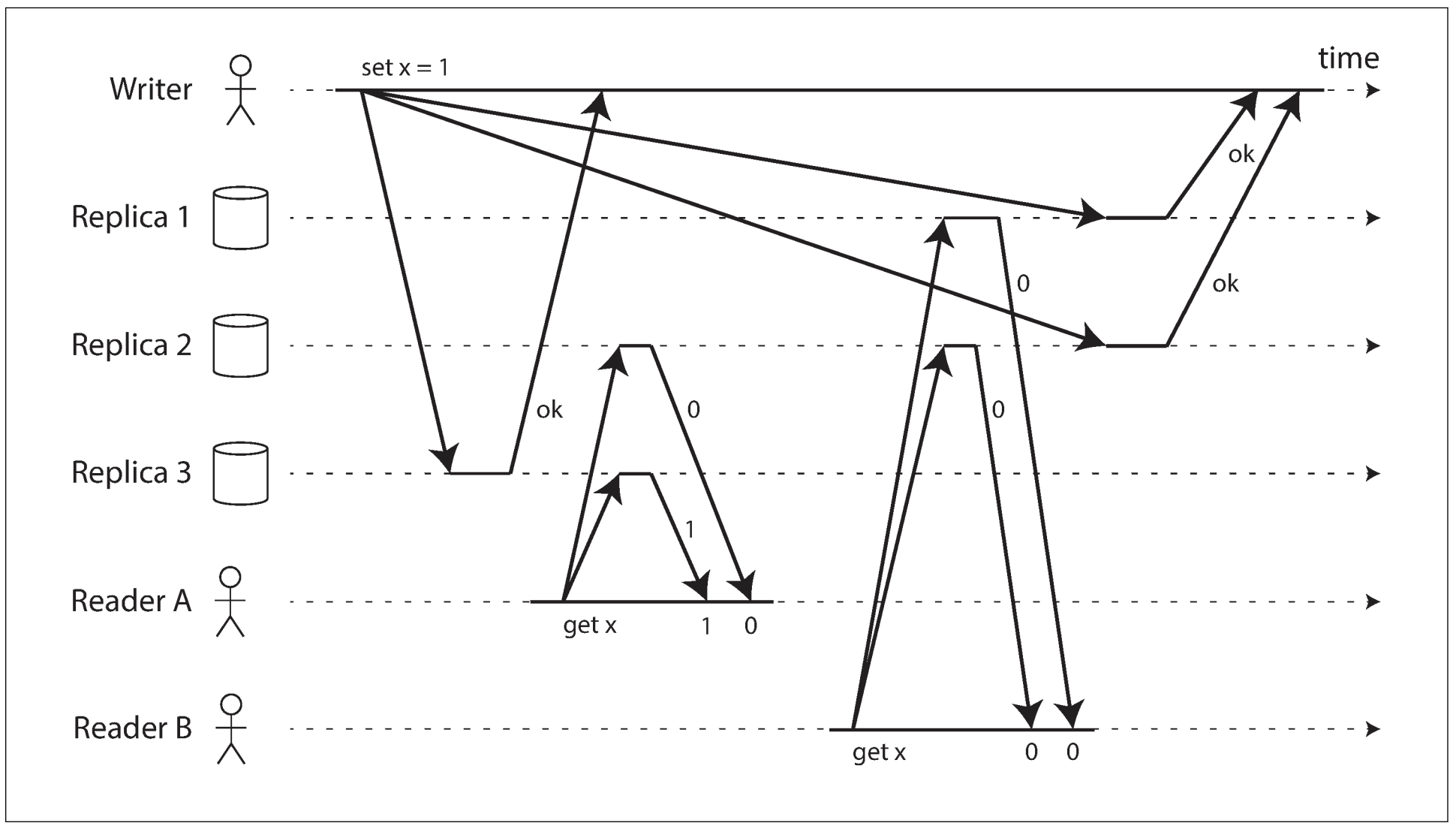
x初始值为0, writer向三个replica发送x = 1的写请求($n = 3, w = 3$). A从两个节点组成的法定人数($r = 2$)读取数据, 并从其中一个节点读取到1. B从两个节点组成的法定人数读取数据, 获得旧值0. 虽然满足了法定人数条件($m + r > n$), 但不满足线性一致性: B的请求在A请求完成之后, 但B拿到旧值, A拿到新值(与Alice和Bob的情况一样).
也可通过降低性能来满足线性一致性: reader在将数据返回给应用前, 必须同步执行read repair(读修复); writer在发送写请求前, 必须读取法定人数节点的最新状态. 由于性能损失, Riak不执行同步读修复; Cassandra在法定人数读取时会等待读修复, 但由于使用LWW的冲突解决方案, 对于同一键的多个并发写入也会破坏线性一致性.
而且这种方法只能实现线性一致性的读写, 不能实现线性一致性的CAS, 因为它需要一个共识算法. 因此, 最好假设Dynamo风格的leaderless系统不提供线性一致性.
2.4 The Cost of Linearizability
下图为多数据中心中的多leader复制: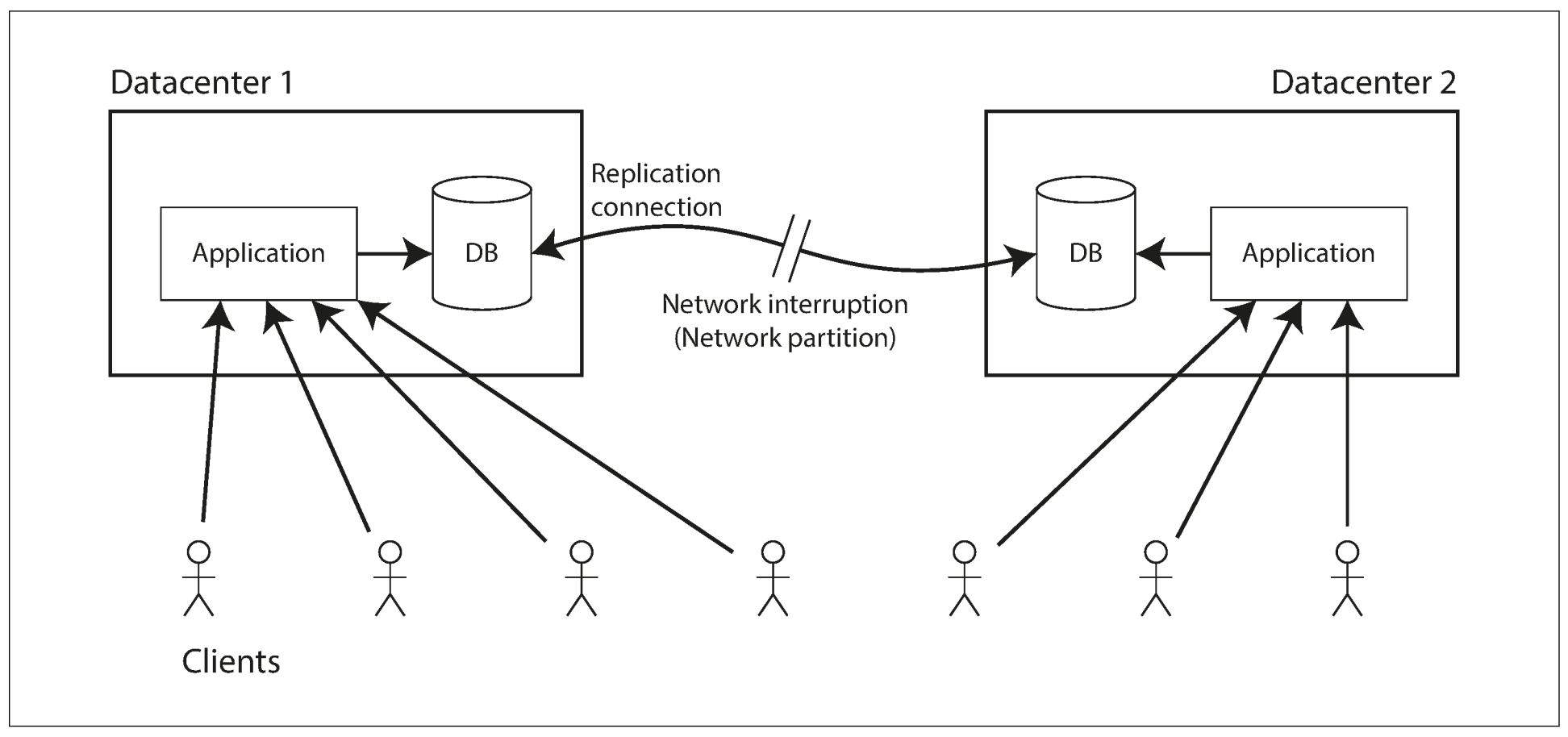
上图两个数据中心之间发生网络中断时, 但数据中心内部网络依旧正常, 客户端也可以连接到数据中心. 由于数据中心之间的写入是异步的, 因此每个数据中心正常运行, 写入会在网络恢复后继续执行.
如果使用单leader复制, 则leader必然处于其中一个数据中心, 任何写入和线性一致的读取都要交由leader处理, 因此连接到follower的客户端, 其读写请求必须通过网络发送给leader所在的数据中心.
若数据中心间的网络中断, 连接到follower的客户端无法连接到leader, 因此无法写入任何数据, 也不能进行线性一致的读取.
2.4.1 The CAP theorem
上述问题不止发生在单leader和多leader复制中, 所有线性一致性的数据库都有这个问题. 即使是单个数据中心内也是如此. 面临的权衡如下:
- 若应用需要线性一致性, 且某些replica与其他replica断开连接, 则这些replica无法处理请求: 要么等待网络恢复, 要么直接返回错误
- 若应用不需要线性一致性, 则可交由任意replica处理请求, 即使出现网络中断, 应用也可照常工作
因此, 不需要线性一致性的应用有更好的网络容错能力, 被称为CAP定理, 由Eric Brewer于2000年命名. CAP一开始只是一个经验法则, 并没有准确定义, 目的是讨论数据库的权衡. 那时分布式数据库侧重于在共享存储的集群上提供线性一致性语义, CAP定理让数据库工程师去探索分布式无共享系统的设计领域, 这类架构更适合实现大规模的网络服务.
CAP有时会被解释为: Consistency(一致性), Availability(可用性), 和Partition(分区), 三者只能选其二. 这种说法是错误的, 因为网络分区是一种无法避免的故障. 当网络无故障时, 系统可提供一致性和可用性; 一旦网络出错, 则只能从两者中选择一个. 因此, CAP更应该解释为: 当发生分区时, 选择一致性还是可用性.
CAP定理的正式定义仅限于比较狭隘的范围: 其只考虑了一种一致性模型(线性一致性)和一种故障(网络分区), 但没有提及网络延迟, 节点死亡, 或其他权衡. 因此, CAP对于设计系统而言没有实际价值.
2.4.2 Linearizability and network delays
虽然线性一致性是一个很有力的保证, 但现实中使用线性一致性的系统非常少. 例如, 即使是现代多核CPU的RAM也不是线性一致性: 若某个CPU上运行的线程写入某个内存地址, 之后另一个CPU上运行的线程从相同内存地址读取数据, 也不能保证读取到新值(除非使用memory barrier).
这是因为每个CPU都有自己的内存缓存和存储缓存区. 默认情况下, 内存访问会优先查找缓存, 任何更改会异步写入内存. 由于缓存的访问速度远高于内存, 因此对CPU的性能至关重要. 但由于存在多个数据副本, 且异步更新, 因此违反了线性一致性.
CAP定理对于多核内存一致性模型没有意义: 计算机内的通信被认为是可靠的, 不必担心某个CPU和其他CPU失去连接. 这里牺牲线性一致性换来的是性能提升, 而不是容错能力.
很多分布式数据库也是为了性能而舍弃线性一致性, 而不是为了容错能力. 线性一致性不光在网络故障时变慢, 正常时也会降低性能.
Attiya和Welch向我们证明: 线性一致性的存储无法与高效兼容: 如果想要线性一致性, 则读写请求的响应时间与网络延迟的不稳定性成正比. 对于高度可变延迟的网络, 读写请求的响应时间也会很高, 只有降低一致性要求才能提高性能. 因此, 对性能敏感的系统需做出一些权衡.
3. Ordering Guarantees
之前讨论过, 线性一致的寄存器看起来好像单个数据副本, 每个操作都会在某个时间点原子生效. 该定义意味着, 操作按照某个定义下的顺序执行, 以下是我们讨论过的顺序:
- 单leader复制中的leader决定了复制日志中的写入顺序, 也就是follower的写入顺序. 若没有leader, 则并发操作会导致冲突.
- 可串行化保证事务看起来像是按照某种先后顺序执行. 它能以串行顺序执行事务, 并防止serialization conflict(序列化冲突, 通过锁或中止事务)
- 在分布式系统中使用时间戳和时钟也是为了引入顺序, 用于确定哪个写入先发生
事实证明, 顺序, 线性一致性和共识之间存在着某种联系. 尽管这些概念很抽象和理论化, 但可帮助我们明确系统的能力范围.
3.1 Ordering and Causality
之所以顺序反复出现, 其中一个原因是: 其能保证causality(因果关系). 因果关系在很多例子中都十分重要:
- 在"一致前缀读"中, 观察者先看到问题的答案, 然后看到被回答的问题, 这违背了因果关系, 因此让人感到困惑: 我们认为问题和答案之间存在causal dependency(因果依赖), 先有问题才能有答案.
- 对于三个leader之间的复制, 一些写入会因网络延迟而覆盖另一些写入. 从replica的角度来看, 我们要更新一个不存在的行. 其中的因果关系是: 先创建记录, 才能更新记录.
- 在"检测并发写入"中, A和B两个操作存在三种可能性: A先于B, B先于A, A和B并发. 操作发生的前后关系就是一种因果关系的体现: 若A先于B, 则B知道A的存在, 或基于A, 或依赖于A; 若A和B并发, 则A与B没有任何因果关系, 或者说, A和B互相不知道彼此.
- 在"事务的快照隔离"中, 我们提到: 事务从一致性快照中读取数据, 这里的"一致性"意味着因果关系保持一致: 如果快照包含答案, 则必须包含被回答的问题. 从某个时间点观察数据库时, 因果关系保持一致表示: 该时间点之前发生的所有操作的影响都可见, 之后发生的操作的影响都不可见. 读偏差表示读取的数据违反了因果关系.
- 事务间的写偏差也说明了因果依赖: 事务认为Bob依然在值班, 因此允许Alice请假. 该例中,
是否批准请假依赖于当前值班情况. 可串行化快照隔离通过追踪事务间的因果关系来检查写偏差. - Alice和Bob观看比赛的例子中, Bob听到Alice的消息后从数据库拿到旧比分, 这违背了因果关系: Alice的消息依赖于比分, 因此Bob也应看到比分.
因果关系给事件施加了一个顺序: 因在果之前, 消息接收后发送消息, 答案在问题后. 因果依赖的操作链定义了因果顺序, 即什么在什么之前发生.
若系统遵循因果关系的顺序, 可认为该系统是causally consistent(因果一致的). 例如, 快照隔离提供了因果一致性: 当读取数据库时, 能看到数据的因果关系.
3.1.1 The causal order is not a total order
Total order(全序)允许任何两个元素进行比较. 例如, 自然数就是全序的: 给定两个数字, 如5和13, 那么13大于5.
但数学集合不完全是全序的: {a, b}与{b, c}不一定谁大谁小, 它们是incomparable(不可比较的), 因此数学几何是partially ordered(偏序的): 某些情况下一个集合大于另一个集合, 但有时无法比较.
全序和偏序在不同的数据库一致性模型中的差异如下:
- Linearizability: 如果系统看起来只有一份数据副本, 且每个操作都是原子性的, 那么我们可以判断任意两个操作的先后顺序.
- Causality: 如果无法说明两个操作哪个先发生, 则这两个操作是并发的. 换句话说, 若两个事件存在因果关系, 则它们之间是有序的. 因果关系定义了一种偏序, 而不是全序: 有些操作之间有顺序, 有些则无法比较.
根据上述定义, 线性一致的存储不存在并发操作: 所有操作都被全序排序在一条时间线上. 可能存在多个请求等待处理, 但系统会确保每个请求都在某个时间点原子处理.
并发意味着时间线存在分支和合并, 无法比较不同时间线上的操作(并发操作). 分布式版本控制系统(如Git), 其版本历史与因果关系图十分相似. 一个commit可在另一个commit之后, 但有时存在多个branch(多个开发人员同时在同一项目上工作), merge会将这些commit合并.
3.1.2 Linearizability is stronger than causal consistency
线性一致性隐含着因果关系: 任何线性一致的系统都能保证因果关系. 如果系统中存在多个信道, 线性一致性可自动保证因果关系, 系统无需做任何特殊操作.
由于确保了因果性, 系统也变得容易理解, 但需要牺牲性能和可用性, 尤其是系统遭遇严重网络延迟时(例如, 系统在地理上散布). 因此, 很多系统会为了性能要求而放弃线性一致性.
线性一致性也不是保证因果性的唯一途径. 系统可以在保持因果性的同时, 没有太多性能折损. 在所有一致性模型中, 因果一致性是最强的一致性模型, 即使网络故障时仍保持可用.
很多情况下, 系统看上去需要线性一致性, 实际上只需要因果一致性.
3.1.3 Capturing causal dependencies
为了维护因果性, 需知道哪个操作在哪个操作之前, 这是一种偏序: 并发操作可以以任意顺序执行, 但若某个操作发生于另一个操作之前, 则所有节点都需以该顺序执行. 因此, 当一个replica处理请求时, 必须确保因果前驱的操作都已完成; 若某个前驱操作丢失, 则阻塞后续操作, 直到前驱操作完成.
为了确定因果依赖, 我们需要一些方法描述系统内节点的"知识". 当一个节点发出写入Y的请求时看到X的值, 那么X和Y可能存在因果关系. 欺诈指控的犯罪调查时经常遇到此类问题: CEO是否在知道X的情况下做出Y决定.
判断某个操作是否在其他操作之前, 这种技巧在"检测并发写入"中提及. 在leaderless的数据存储中, 为了防止丢失更新, 需检测某个键的并发写入. 因果一致性则更进一步: 其需要跟踪整个数据库中的因果依赖, 而不是某个键.
为了确定因果顺序, 数据库需知道应用读取了哪个版本的数据. 可串行化快照隔离中有类似的冲突检测: 当提交事务时, 数据库会检测它所读取的版本号是否为最新的.
3.2 Sequence Number Ordering
虽然因果性是一个重要的理论概念, 但实际中不可能跟踪所有因果关系. 对于大多数应用, 客户端会在写入前读取大量数据, 无法判断下次写入依赖于之前的哪些读取. 跟踪所有已读数据会导致巨大开销.
因此, 我们可以使用sequence number(序列号)或timestamp(时间戳)来排序事件. 时间戳无需从日历时钟获取, 可来自逻辑时钟.
这种序列号或时间戳十分紧凑(只有几个byte), 且提供全序: 每次操作都有唯一序列号, 可比较任意两个操作的序列号.
我们也可使用consistent with causality(与因果一致的)的全序来生成序列号: 若操作A在因果上先于操作B, 则A的序列号小于B. 并发操作可任意排序. 这种全序关系捕获了所有因果信息, 但也施加了更严格的顺序.
对于单leader复制, 复制日志定义了与因果一致的写操作. Leader会为每个操作分配一个单调递增的序列号. 只要follower按照复制日志中的顺序写入, 则始终保持因果一致.
3.2.1 Noncausal sequence number generators
若不存在单一leader, 则很难为每个操作分派序列号. 以下是针对多leader复制的方法:
- 每个节点生成各自的序列号. 例如, 存在两个节点, 其中一个节点只生成奇数, 另一个节点只生成偶数. 可在序列号的二进制表示中预留一些位作为节点的唯一标识符, 这样可保证不同的节点不会生成相同的序列号
- 为每个操作附加一个日历时钟的时间戳. 时间戳并不连续, 但只要分辨率足够高, 也可提供全序操作
- 预留序列号区块. 例如, 节点A拥有$[1, 1000]$的序列区间, 节点B拥有$[1001, 2000]$的序列区间, 每个节点独立分配各自的序列号, 不够时再分配新的区间
上述三种方法比单leader的自增计数器性能好, 且更具伸缩性. 但它们都有一个问题: 由于节点生成的序列号无法捕获跨节点的操作顺序, 序列号与因果不一致, 因而产生因果问题:
- 每个节点每秒都处理不同数量的操作. 假设节点A只生成偶数序列号, 节点B只生成奇数序列号, 则A可能落后于B. 我们无法判断一个奇数序列号和一个偶数序列号哪个更先发生.
- 日历时钟生成的时间戳受到时间偏差的影响, 会导致因果不一致
- 对于区间分配, 假设一个序列号来自$[1001, 2000]$区间, 然而更晚的操作可能来自$[1, 1000]$区间, 序列号与因果关系也是不一致的.
3.2.2 Lamport Timestamp
虽然上述三种序列号生成方法与因果不一致, 但有另一种因果一致的序列号生成方法, 称为Lamport timestamp(兰伯特时间戳), 于1978年由Leslie Lamport提出. 以下是一个Lamport时间戳的应用: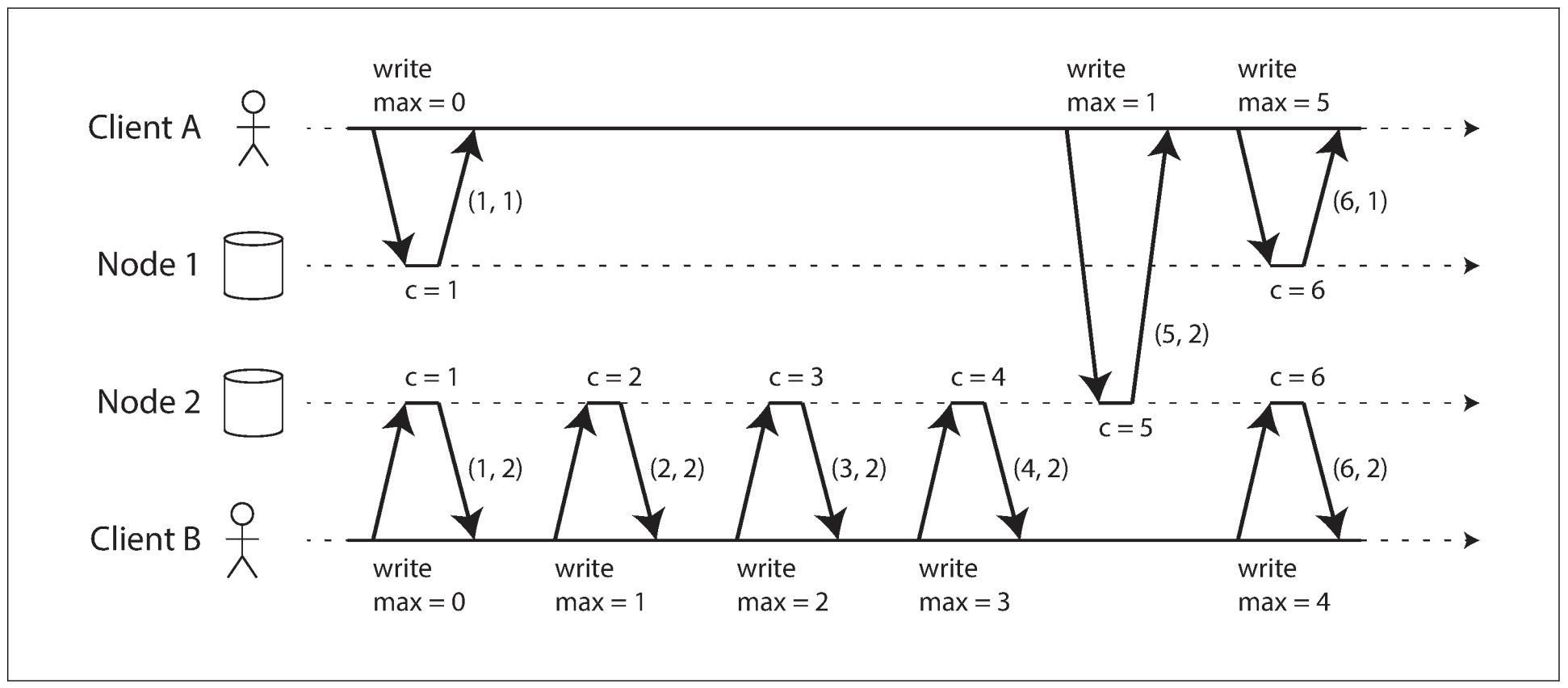
上图中每个节点都有一个唯一标识符, 和记录操作数的计数器. Lamport时间戳由(counter, node ID)组成. 两个节点可能生成相同的计数值, 但由于节点ID是唯一的, 因此时间戳也是唯一.
Lamport时间戳与日历时钟无关, 但提供了一个全序: 当我们有两个时间戳, 谁的计数值越大, 时间戳就越大; 若计数值相同, 则由节点ID决定顺序. 截至目前, 该方法与奇数/偶数的方法没有太大区别, 真正让Lamport时间戳实现因果一致性的关键在于: 每个节点和客户端都跟踪各自见到的最大计数值, 若节点收到的请求大于自己的计数值, 则将自己的计数器设置为该值.
上图中, A收到节点2的响应, 其中计数值为5, 由于该值大于自己的最大值1, 因此将计数值改为5, 下一次操作的计数值为6. 只要每次操作都携带最大计数值, 则每个因果依赖的操作都有递增的时间戳, 因此可保证Lamport时间戳与因果一致.
Lamport时间戳有时会与"检测并发写入"的版本向量混淆. 虽然两者有相似之处, 但目的不同: 版本向量用于判断一个操作是否与另一个操作并发, Lamport时间戳用于实现一个全序. 对于Lamport时间戳, 我们无法判断两个操作是否并发, 或它们之间是否存在依赖.
3.2.3 Timestamp ordering is not sufficient
虽然Lamport时间戳定义了一个因果一致的全序, 但仍不足以解决分布式系统中的很多问题. 例如, 系统需要确保每个账户都有唯一用户名. 若两个用户同时使用相同用户名, 则应该是其中一个成功, 另一个失败.
乍看之下, 全序可以解决该问题: 时间戳更小的操作为胜者, 更大时间戳的操作失败. 由于时间戳是全序的, 因此可以比较任意两个操作. 但创建用户是一个实时问题, 而Lamport时间戳适合在事后决定胜者: 只有等到所有创建用户的操作完成后, 才能比较时间戳; 当节点收到创建用户的请求时, 需立刻做出决定, 然而此时节点并不知道其他节点是否正在处理相同用户名的请求, 也就无法比较时间戳.
为确保其他节点没有处理相同的用户名, 且时间戳更小的请求, 我们需要检查每个节点都在做什么. 若某个节点出现故障或断开连接, 则整个系统陷入停滞, 这并不是我们想要的容错系统.
这里的问题在于, 只有收集完所有操作后才能构建出一个全序; 若某个节点产生了一些操作, 但我们无法知道这些操作, 则无法构造全序关系: 这些未知操作可能出现在全序中的任意位置.
总之, 为了实现用户名的唯一性约束, 不能只依赖于操作的全序, 还需要知道全序何时完成. 若想创建一个用户名, 需确保其他节点没有在你的操作前写入相同用户名.
3.3 Total Order Broadcast
若代码只在一个CPU上运行, 则操作的全序就是CPU上执行的顺序. 但在分布式系统中, 很难让所有节点对一个全局顺序上达成一致. 虽然可以用时间戳和序列号, 但都不如单leader复制(使用时间戳就舍弃了容错能力).
单leader复制就像单核CPU, leader执行操作的顺序决定了操作的全序, 其挑战在于如何增加leader的吞吐量, 如何处理leader宕机, 这类问题称为total order broadcast(全序广播)或atomic broadcast(原子广播).
全序广播作为一种节点间交换消息的协议, 其需满足两个安全属性:
- Reliable delivery(可靠交付): 不会丢失消息, 若消息被传递给一个节点, 则将被传递给所有节点
- Totally ordered delivery(全序交付): 消息以相同的顺序传递给每个节点
全序广播算法需确保可靠性和有序性, 即使节点或网络报错. 虽然会因网络中断而导致消息无法传递, 但算法可保证消息会在网络恢复后送达.
3.3.1 Using total order broadcast
ZooKeeper和etcd这类共识服务都实现了全序广播, 暗示了共识与全序广播存在着紧密关联. 若每个消息都表示一次数据写入, 且每个replica以相同顺序执行, 则replica间将保持一致(复制延迟除外). 这一原理称为state machine replication(状态机复制).
全序广播也可用于实现可串行化的事务: 若每个消息表示一个事务, 则数据库的分区和副本都互相保持一致.
全序广播的一个重要表现是: 当发送消息时, 消息的顺序就被固定下来, 节点无法向之前的时间点插入消息. 从另一个角度来说, 全序广播类似于创建一个日志(如复制日志, 事务日志, 或WAL): 发送消息等同于在日志中追加消息. 由于所有节点以相同顺序传递相同的消息, 因此所有节点都可以读取日志, 并看到相同的消息序列.
全序广播也可用于实现锁服务来提供fencing token. 每个申请锁的请求都作为一条消息被追加到日志末尾, 且所有消息都按照日志中出现的顺序依次编号. 由于序列号单调递增, 因此可作为fencing token. 在ZooKeeper中, 序列号被称为zxid.
3.3.2 implementing linearizable storage using total order broadcast
线性一致的系统中存在操作的全序, 但线性一致不等同于全序广播, 两者存在紧密联系.
全序广播是异步的: 消息以固定顺序可靠传送, 但不保证消息何时抵达; 线性一致性是新鲜度保证: 读取必须获得最新的写入值. 不过我们可以基于全局广播来实现线性一致的存储. 例如, 确保用户名的唯一性.
假设对于每个可能的用户名, 都有一个可进行CAS原子操作的线性一致寄存器. 每个寄存器的初始值为null. 当创建用户名时, 对该用户名的寄存器执行CAS操作: 若寄存器的值为空, 则将其设置为该用户的账户ID. 若多个用户同时获取相同用户名, 只有一个CAS操作会成功.
通过将全序广播作为一个可追加日志, 可实现线性一致的CAS操作:
- 日志追加一个消息, 试探性地声明想要的用户名
- 读取日志, 等待刚才追加的消息被读回
- 检查是否有任何消息已经声明该用户名. 若声明该用户名的第一条消息是自己的消息, 则说明该用户名属于自己, 可提交声明并向客户端确认; 如果不是自己的消息, 则中止操作.
若存在多个并发写入, 由于日志项以相同顺序发往所有节点, 因此所有节点会对最先到达者达成一致. 选择冲突写入中的第一个作为胜者, 并中止后来者, 从而让所有节点对某次写入达成一致, 类似的方法也可用于实现可序列化的多对象事务.
尽管上述过程能保证线性一致的写入, 但不能保证线性一致的读取: 从异步更新的日志读取到的数据可能是旧值. 以下是实现线性一致读取的方法:
- 在日志中追加消息, 读取日志, 等待消息返回后再执行真正的读取. 消息在日志中的位置决定了读取发生的时间点
- 如果日志允许以线性一致的方式获取最新日志消息的位置, 则可查询该位置, 等待该位置之前的所有消息传回, 然后执行读取(ZooKeeper
sync()背后的思想) - 从同步更新的的副本中读取, 该副本一定是最新的
3.3.3 Implementing total order broadcast using linearizable storage
上一节讨论了如何基于全序广播构建线性一致的CAS操作. 现在反过来: 假设我们有线性一致的存储, 如何构建全序广播.
最简单的方法是使用线性一致的寄存器来存储一个整数, 该寄存器有自增并返回的操作, 或原子CAS操作.
每个要通过全序广播发送的消息, 必须先对寄存器执行自增并返回操作, 获取一个整数, 并将该值作为序列号附加在消息中. 之后可向所有节点发送该消息, 接收到该消息的节点会按序列号顺序传递消息.
与Lamport时间戳不同, 从线性一致寄存器获得的数字是连续的. 因此, 若某节点发送了序列号为4的消息, 并接收到序列号为6的消息, 那么存在序列号为5的消息未被接收. 这也是全序广播和时间戳排序的关键区别.
问题在于如何创建一个线性一致且具有自增并返回操作的整数: 若没有任何意外发生, 可放置在节点中的某个变量中; 但问题在于该节点可能断开网络, 或因节点崩溃而丢失数值. 只要思考线性一致的序列号生成器足够深入, 就不可避免地想到共识算法.
4. Distributed Transactions and Consensus
共识是分布式计算中最重要且最基础的问题之一. 表面上看起来很简单: 让多个节点同意某个事件. 但很多系统故障都是因为轻视了该问题. 共识在诸多场景下都十分重要:
- Leader election: 单leader复制的数据库中, 所有节点需就哪个节点成为leader达成一致. 网络故障可能导致某些节点对leader的归属权产生争议. 此时, 共识可避免错误的故障切换, 进而避免两个节点都认为自己是leader.
- Atomic commit: 在支持跨节点或跨分区事务的数据库中, 事务可能在某些节点上生效, 而在其他节点上失效. 若想维护事务的原子性, 需让所有节点对事务的结果达成一致. 这类共识问题也称为atomic commit(原子提交)问题.
Ficher, Lynch和Paterson提出的FLP结果证明了: 如果存在节点崩溃的风险, 则不存在总能达成共识的算法. 在分布式系统中, 节点崩溃是一种必然, 所以无法实现共识么? FLP结果的证明环境为异步系统模型, 该模型假设算法无法使用任何时钟和超时. 如果系统允许使用超时, 或其他检测节点是否崩溃的方法, 那么可以实现共识.
2PC(two-phase commit)是数据库, 消息队列和服务器解决原子提交问题的常见方法. 虽然2PC并不是一个很好的共识算法, 但通过学习2PC可以更好地理解共识算法.
4.1 Atomic Commit and Two-Phase Commit(2PC)
事务原子性的目的在于: 多次写入中途出错的情况下提供一个简单的语义, 事务的结果要么成功提交, 所有写入都是持久化的; 要么中止, 所有写入都被回滚.
原子性可避免失败的事务让数据库陷入半更新的状态. 支持多对象事务和次级索引的数据库需要原子性: 每个次级索引都是与主数据分离的数据结构, 修改数据时, 对应的次级索引也需进行对应的修改, 原子性保证次级索引与主数据保持一致.
4.1.1 From single-node to distributed atomic commit
对于单节点数据库, 事务的原子性由存储引擎实现. 提交事务时, 数据库会将事务的写入持久化(通常在WAL中), 然后将提交记录追加到磁盘中的日志里. 若数据库中途崩溃, 可从日志中恢复事务: 若提交记录已被写入磁盘, 说明事务已成功提交; 若没有提交记录, 则回滚事务的所有写入.
因此, 单节点上事务的提交依赖于磁盘写入的顺序: 首先是数据, 然后是提交记录. 磁盘是否写入提交记录决定了事务是否提交: 写入提交记录前, 事务有可能被中止(由于崩溃); 写入提交记录后, 事务成功提交. 因此, 单一设备(单个磁盘的控制器)让提交具备原子性.
但如果事务涉及多个节点, 例如, 分区数据库中会有多对象事务, 或按关键词分区的次级索引, 绝大多数NoSQL分布式数据存储不支持分布式事务, 但很多关系数据库集群支持.
此时, 将提交请求发送给所有节点, 并让节点各自提交事务是不够的, 这么做会导致某些节点成功提交, 其他节点失败, 从而违反原子性:
- 某些节点检测到违反约束或冲突, 从而中止事务, 其他节点成功提交
- 某些提交请求在网络中丢失, 最终因超时而中止, 其他节点成功接收并提交
- 某些节点在写入记录时宕机, 并在恢复后回滚, 其他节点成功提交
若某些节点提交事务, 而其他节点中止, 则节点间出现不一致. 一旦某个节点提交了事务, 即使发现其他节点中止了该事务, 也无法撤回. 出于该原因, 一旦确定其他节点都提交事务, 该节点也必须提交.
事务提交后不可被撤回: 一旦提交数据, 其写入将对其他事务可见, 因此其他客户端会依赖于其写入. 这一原则构成了读已提交隔离级别的基础.
4.1.2 Introduction to two-phase commit
2PC是一种在跨节点上实现原子事务提交的算法, 即确保所有节点都提交或中止. 2PC作为分布式数据库的经典算法, 常用于数据库, 或以XA事务形式(如Java Transaction API)服务于应用, 或以WA-WSAtomicTransaction形式服务于SOAP Web服务. 2PC的基本流程如下: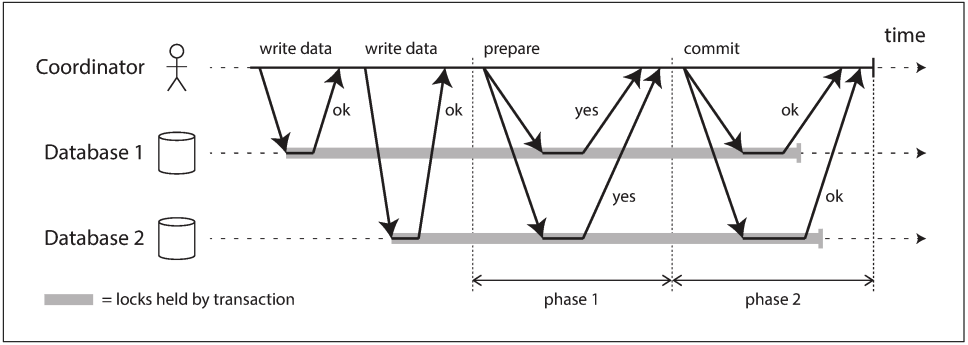
2PC的提交/中止流程分为两个阶段, 而不是单节点事务中的单个提交请求. 2PC使用一个新的组件: coordinator(协调者, 也称为transaction manager). Coordinator在请求事务的应用进程中以库的形式实现(如, 嵌入在Java EE容器中), 但也可作为一个独立的进程或服务.
正常来说, 应用在多个节点上读写数据标志着2PC事务的开始, 这些节点称为participants(参与者). 当应用开始提交时, coordinator会开始阶段1: 向所有节点发送prepare(准备)请求, 询问所有participant是否能够提交, 并收集所有回复:
- 若所有participant都回复Yes, 则coordinator可在阶段2发送commit(提交)请求, 然而提交真正进行
- 若某个participant回复No, 则coordinator会在阶段2向所有节点发送abort(中止)请求
这一过程类似于西式婚礼仪式: 牧师分别询问新郎和新娘是否愿意, 通常会收到双方的"我愿意", 之后牧师会宣布结为夫妻, 表示事务成功提交, 这一事实会广播至所有参与者. 若新郎或新娘一方没有回复"我愿意", 则婚礼中止.
4.1.3 A system of promises
但我们还没理解为什么跨节点的2PC能保证原子性. 为理解2PC的工作原理, 需将每一步细分:
- 当应用开始一个分布式事务时, 需向coordinator请求一个事务ID, 该事务ID是全局唯一的.
- 应用会在每个participant上开启一个单节点事务, 并为其添加事务ID. 所有读写都会在该事务中进程. 若此期间出现任何错误(节点崩溃或请求超时), coordinator和participant都可以中止事务.
- 当应用准备提交时, coordinator会向所有participant发送带有事务ID的准备请求. 若某个请求失败或超时, coordinator会向所有participant发送中止请求.
- participant收到准备请求后, 需确保在任何情况下都可以提交事务, 包括将数据写入磁盘(故障, 停电, 或磁盘空间不足都不是拒绝提交的理由), 检查是否违反约束或产生冲突. 向coordinator回复YES, 表示该节点一定会成功提交. 换句话说, 虽然还未提交, 但已不能中止该事务.
- coordinator收到所有回复后需做出决定: 若所有participant都回复YES, 则选择提交事务; 否则中止该事务. Coordinator必须将决定写入事务日志, 若节点崩溃, 恢复后也能知道决定结果, 被称为commit point(提交点)
- 一旦coordinator的决定写入磁盘, 会向所有participant发送提交或中止请求. 若请求失败或超时, coordinator会不断重试直到成功. 如果决定是提交, 则没有回头路, 无论重发多少遍都必须提交. 若participant在此期间崩溃, 由于之前回复了YES, 因此不能拒绝, 必须在恢复后提交.
该协议有两个不可逆的时间点, 这些不可撤销的承诺保证了2PC的原子性:
- participant回复YES时, 承诺其之后一定能够提交(虽然coordinator可能选择中止事务)
- 一旦coordinator做出决定, 该决定是不可逆的
回到婚礼的比喻, 在说出"我愿意"之前, 新郎和新娘都可以中止事务. 然而一旦说出"我愿意"则无法撤销. 即使没有听到牧师宣布夫妻关系成立, 也不能改变事务必须提交的事实. 通过事务ID向牧师查询可知道是否宣布夫妻关系, 或等待牧师的下一次宣布.
4.1.4 Coordinator failure
我们已经讨论了participant崩溃或网络中断的情况: 若准备请求失败或超时, coordinator会中止事务; 若提交或中止请求失败, coordinator会不断重试. 然而没有提到coordinator崩溃的情况.
若coordinator在发送准备请求前崩溃, participant可安全地中止事务. 但一旦participant接收了准备请求并回复YES, 就无法中止. 若coordinator崩溃或网络中断, participant只能等待, 这种事务状态称为in doubt(存疑).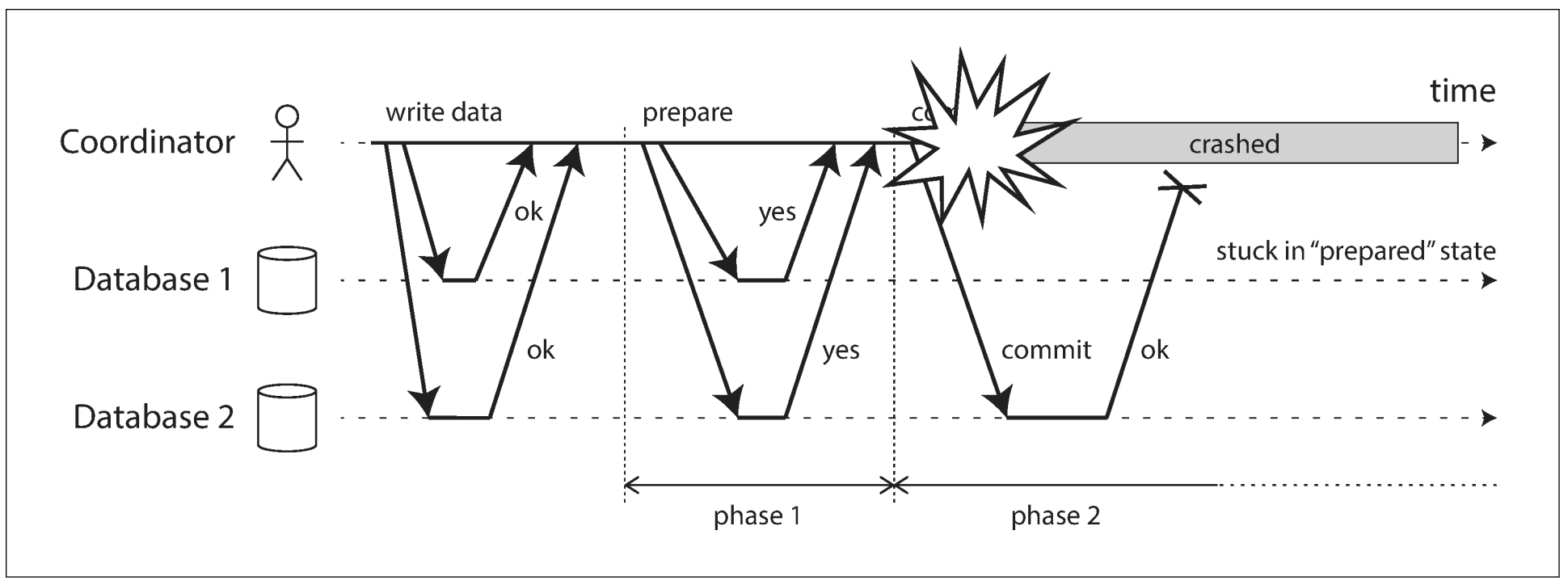
上图中, coordinator决定提交事务, 数据库2收到提交请求. 但还未向数据库1发送提交请求, 此时coordinator崩溃, 数据库1不知道该提交还是中止. 数据库1无法使用超时: 若使用超时并中止事务, 会数据库2不一致; 若提交, 其他数据库可能已经中止.
理论上, participant可询问其他所有participant是否同意提交, 但这不是2PC协议所讨论的.
唯一方法就是等待coordinator恢复运行, 这也是为何coordinator发送提交或中止前必须将决定写入事务日志中: coordinator恢复后可读取事务日志, 并找到所有in-doubt状态的事务. 若日志中没有提交记录, 则中止该事务. 因此, 2PC的提交点其实是coordinator上的单节点原子提交
4.1.5 Three-phase commit
由于2PC可能需要等待coordinator恢复, 因此2PC称为blocking atomic commit(阻塞原子提交)协议. 理论上, 可以将原子提交协议做成nonblocking(非阻塞), 这样即使节点崩溃也无需等待. 但这种协议实践起来很复杂.
作为2PC的替代方案, 还有一种称为3PC(三阶段提交)的算法, 然而, 3PC的前提是网络延迟有界, 节点响应时间有限. 但大多数系统的网络延迟都无上限, 且存在进程暂停, 因此无法保证原子性.
非阻塞原子提交要求一个完美的故障检测机制, 即一种可靠的机制来判断某个节点是否崩溃. 无上限延迟的网络中, 超时并不是一种可靠的故障检测机制, 即便超时, 节点也有可能未出现故障. 因此, 尽管存在coordinator故障问题, 大家仍选择使用2PC.
4.2 Distributed Transactions in Practice
分布式事务, 尤其是2PC实现的分布式事务毁誉参半. 一方面, 其提供了重要的安全性保证; 另一方面, 其导致的运维困难和性能下降都饱受批评. 很多云服务会因运维问题而放弃实现分布式事务.
分布式事务的某些实现会带来严重性能损失, 例如, MySQL的分布式事务会比单节点事务慢10倍以上. 2PC的性能问题源于额外的刷盘(fsync, 用于崩溃后的恢复), 以及额外的网络往返.
但我们也不应无视分布式事务, 而是更加仔细地审视这些事务, 并从中学习. 首先, 必须明确什么是"分布式事务", 以下是两种不同的分布式事务:
- Database-internal distributed transactions(数据库内部的分布式事务): 有些分布式数据库(配置中使用replication和partition的数据库)支持多节点间的内部事务. 例如, VoltDB和MySQL Cluster的NDB存储引擎支持内部事务. 所有参与事务的节点都运行相同的数据库软件.
- Heterogeneous distributed transactions(异构分布式事务): participant由两种或两种以上的技术构成. 例如, 两个数据库来自不同的供应商, 甚至是非数据库系统(如message broker). 跨系统的分布式事务必须保证原子提交, 即使系统完全不同.
数据库内部事务没有任何兼容问题, 可使用任何协议, 并针对特定技术进行优化. 因此, 数据库内部分布式事务通常工作良好, 而异构技术的事务更具有挑战性.
4.2.1 Exactly-once message processing
异构分布式事务允许不同的系统以不同方式集成. 例如, message broker(消息代理)中的消息被标记为已处理, 当且仅当处理消息的数据库事务成功提交. 这可以通过在一个事务中原子提交message acknowledge(消息确认)和database write(数据库写入)来实现. 即使消息代理和数据库属于两个不相关的技术, 也可实现分布式事务.
若消息传递或数据库事务失败, 两者都会被中止, 消息代理可稍后重传消息. 因此, 通过原子提交消息处理及其副作用, 可确保消息只被处理一次, 中止事务不会带有任何副作用.
然而, 只有所有受事务影响的系统都使用相同的原子提交协议, 才能实现分布式事务. 例如, 假设处理消息会发送邮件, 而邮件服务器不支持2PC: 消息的重传会发送多封邮件. 但如果副作用都可以在事务中止时回滚, 则重试不会有任何影响.
4.2.2 XA transactions
X/Open XA(eXtended Architecture)是一种跨异构技术实现2PC的标准. 很多传统关系数据库(PostgreSQL, MySQL, DB2, SQL Server, Oracle)和消息队列(ActiveMQ, HornetQ, MSMQ, IBM MQ)都支持XA. XA不是一个网络协议, 而是一个与coordinator连接的C API. 其他语言也实现了该API. 例如, 对于Java EE应用, XA事务会使用Java Transaction API(JTA)实现, 许多使用JDBC的数据库驱动, 以及使用JMS API的消息代理都支持JTA.
XA假设应用使用网络驱动或客户端库与participant(数据库或消息服务)通信. 若驱动支持XA, 意味着其会调用XA API以判断操作是否为分布式事务的一部分, 如果是, 则向数据库发送必要消息. 驱动还会向coordinator暴露回调接口, coordinator可通过回调让participant准备, 中止, 或提交.
事务coordinator需实现XA API. 实现的方式没有统一标准, 但coordinator通常是一个库, 被加载到发起事务的应用进程中. 其会跟踪事务中的所有participant, 发送准备请求后收集participant的回复, 并使用日志记录每次事务的决定(提交或中止).
若应用进程崩溃, 或所处的机器宕机, coordinator也不复存在. 任何准备好但还未提交的participant都会卡住. 由于coordinator的日志存放在应用服务器的磁盘中, 因此必须重启该服务器, 且coordinator必须读取日志以恢复每个事务的commit/abort结果. Coordinator只能通过数据库驱动的XA回调要求participant提交或中止, 服务器无法直接联系coordinator, 因为所有通信都必须经过客户端库.
4.2.3 Holding locks while in doubt
我们为何这么关心in-doubt的事务? 为何不无视该事务, 并让系统的其他部分继续运行?
问题在于locking(锁), 为了防止脏写, 数据库事务会获取修改行上的row-level exclusive lock(行级排它锁). 如果需要serializable isolation, 数据库会使用2PL(two-phase locking)为所有读取行获取一个shared lock(共享锁).
在提交或中止事务前, 数据库无法释放这些锁. 因此, 陷入in-doubt的事务会一直持有锁. 如果coordinator崩溃持续20分钟, 则这些锁会被持有20分钟. 若coordinator的日志丢失, 锁会永久保留, 直到管理员手动解决.
其他事务会因锁的存在而无法修改行. 有些数据库甚至会阻塞行的读取, 从而导致应用大面积不可用.
4.2.4 Recovering from coordinator failure
理论上, 崩溃后恢复的coordinator应从日志中处理in-doubt事务, 但实际上, orphaned in-doubt transaction(孤儿存疑事务)依然存在, 即处于某些原因(如, 事务日志丢失或软件bug)导致coordinator无法确定事务的决定, 事务无法自行解决, 从而一直留在数据库中, 持有锁并阻塞其他事务.
即使重启服务器也无法解决该问题, 因为2PC会一直保留in-doubt事务的锁. 唯一的解决方法是管理员手动决定哪些事务提交, 哪些事务回滚. 管理员必须检查每个in-doubt事务的participant, 这就需要大量人力, 并且此时系统很可能已遭遇大面积宕机, 管理员还需面对巨大精神压力.
许多XA实现都有一个紧急处理方案, 称为heuristic decisions(启发式决策): 允许participant单方面决定是否提交或中止in-doubt事务. heuristic是一种委婉的说法, 其实破坏了2PC承诺的原子性. 因此, heuristic decision只是为了避免灾难发生, 而不是日常使用.
4.2.5 Limitations of distributed transactions
XA事务解决了多个participant(数据系统)保持一致的问题, 但也引入了运维问题. Coordinator本身也是一种数据库, 也需要像其他数据库一样小心使用:
- 若coordinator只在单台机器上运行, 则单节点的崩溃会导致整个系统停滞.
- 很多服务器端应用都是stateless model(无状态模式), 所有持久状态都存储在数据库中, 因此应用服务器可随时添加或删除. 然而, 当coordinator成为应用服务器的一部分, 会改变其部署方式: coordinator的事务日志是持久系统状态的关键部分, 与数据库地位相同, 应用服务器也就不再是无状态的.
- 由于XA需要兼容多种数据系统, 因此必须是所有系统的最小公因数. 例如, 其无法检测跨系统的死锁(因为需要一个标准协议来交换每个事务等待的锁信息), 也无法与SSI协同工作, 因为这需要一个跨系统定位冲突的协议.
- 对于数据库内部分布式事务, 限制就没那么大. 但2PC成功提交事务仍需所有participant的响应, 若系统中的某个部件崩溃, 则事务失败. 分布式事务有放大局部失效的趋势, 与构建容错系统的目标相悖.
4.3 Fault-Tolerant Consensus
简单来说, 共识意味着多个节点就某件事达成一致. 例如, 几个人同时预定某个航班的最后一个座位, 或电影的相同位置, 共识算法负责决定互不兼容的多个操作中, 谁是胜者.
共识问题可形式化为: 一个或多个节点propose(提议)某些值, 共识算法decide(决定)其中一个值. 对于订座问题, 当多个用户同时购买最后一个座位, 每个节点会提议各自用户的ID, 决定则表示哪个用户获得了该座位.
共识算法需满足以下属性:
- Uniform agreement(一致同意): 不存在两个决定不同的节点
- Integrity(完整性): 不存在决定两次的节点
- Validity(有效性): 若节点决定了值v, 则v一定是由某个节点所提议
- Termination(终止): 由所有未崩溃的节点做决定
Uniform agreement和integrity定义了共识的核心思想: 每个节点做出相同决定, 且一旦决定就不能修改. Validity属性是为了排除一些特殊算法, 例如: 无论节点提议什么值, 最终决定都为null. 这种算法的确满足前两个属性, 但不满足validity.
如果不考虑容错, 前三个属性还是比较容易满足: 可将一个节点指定为"独裁者", 让该节点做出所有决定; 若该节点失效, 则系统不再做出任何决定. 这是2PC的工作方式: 一旦coordinator失效, in-doubt状态的participant无法决定是否commit或abort.
Termination形式化了容错的思想, 实际上可表示为: 共识算法不能什么都不做, 即使某个节点发生故障, 其他节点仍需达成决定.
共识的系统模型假设: 当一个节点崩溃时, 其永远不会回来. 该系统模型中, 任何需要等待节点恢复的算法都无法满足termination属性, 因此2PC不满足共识算法的要求.
当然, 若所有节点都崩溃, 没有任何算法可以达成决定, 容错也要有个上限: 共识算法需要大部分节点正常运行才能保证termination属性.
因此, termination存在一个前提: 半数以上的节点存活. 但即使大多数节点失效, 共识算法仍能保证前三个属性. 所以出现大规模中断时, 系统虽然无法处理请求, 但至少不会做出错误决定.
绝大多数共识算法假设系统中没有拜占庭故障. 换句话说, 如果节点不遵循协议, 其可能破坏协议的安全属性.
4.3.1 Consensus algorithms and total order broadcast
最著名的容错共识算法为VSR(Viewstamped Replication), Raft和Zab. 这些算法有一些相似之处, 但不完全相同. 本文不会深入每个算法的细节, 只会从更宏观的角度讲思路.
大多数算法不会直接使用上述的形式化模型(提议并决定某个值, 同时满足四种安全属性). 相反, 它们会决定值的顺序(sequence), 从而成为全序广播算法.
全序广播要求消息按照相同的顺序, 只发送给每个节点一次, 相当于进行了多轮共识: 在每一轮中, 节点提议下一条要发送的消息, 并在全序中决定下一条要发送的消息. 所以全序广播相当于重复进行多轮共识:
- 由于uniform agreement属性, 所有节点以相同顺序发送相同消息
- 由于integrity属性, 消息不会重复
- 由于validity属性, 消息不会损坏, 也不会凭空出现
- 由于termination属性, 消息不会丢失
4.3.2 Single-leader replication and consensus
对于单leader复制, 所有写入都交由leader, 并以相同顺序应用到follower, 从而使得副本保持最新状态, 这实际上就是一个全序广播.
但问题在于如何选出leader: 如果手动配置leader, 则leader所在的节点失效后, 系统无法接收写请求, 因此无法满足termination属性; 一些数据库支持自动选举leader和故障切换, 若leader所在的节点失效, 会将某个follower升级为leader, 从而实现容错的全序广播, 也就可以借助全序广播来达成共识.
但上述存在一个悖论: 之前我们讨论过脑裂问题: 若两个节点都认为自己是leader, 会导致数据库进入不一致的状态, 因此需要共识算法来选举一位leader, 而共识基于全序广播, 全序广播又需要leader.
要选出一个leader, 必须先有一个leader. 因此要解决共识问题, 必须跳出选举leader的循环
4.3.3 Epoch numbering and quorums
上述所有讨论的共识协议都使用到一个leader, 但却不能保证leader唯一. 那么可以退一步, 先提供一个更弱的保证: 协议定义了一个epoch number(纪元编号, 在Paxos中称为ballot number, 在Viewstamped Replication中称为view number. Raft中称为term number), 并保证在每个纪元中, leader是唯一的.
当现任leader失效时, 节点会开始一场投票来选举新leader. 每次选举都会被赋予一个递增的纪元编号, 因此纪元编号是全序且单调递增的. 若持有不同的epoch的两个leader产生冲突(可能是因为前任leader未死亡), 则更高纪元编号的leader说了算.
节点无法相信自己的判断, 即使自己认为自己是leader, 并不意味着其他节点认同自己的leader身份, 因此leader需要从法定人数的节点中获得投票.
当leader做出决定时, 需将提议值发送给其他节点, 并等待法定人数节点的响应. 法定人数通常表示大多数节点. 若节点没有见过纪元编号更高的leader, 则会同意该提议.
因此存在两轮投票: 第一次是为了选出一个leader, 第二次是对leader的提议表决. 关键在于, 两次投票的法定人数必须重叠: 若提议被通过, 则至少有一个节点参加了最近的leader选举. 因此, 若对提议的投票中没有出现更大的纪元编号, 说明提议的leader就是当前leader, 可以决定提议值.
该投票过程表面上类似于2PC, 最大的区别在于, 2PC的coordinator不是选举的, 且需要每个participant的赞成; 而容错共识算法只需要多数节点的投票. 此外, 共识算法还定义了一个恢复过程, 让节点选举出新的leader后进入一致的状态.
4.3.4 Limitations of consensus
对于分布式系统, 共识算法是一次巨大的突破: 其为不可靠的系统带来基础的安全属性(uniform agreement, integrity和validity), 并且提供了容错(只需多数节点正常工作). 其提供了全序广播, 因此我们能以容错方式实现线性一致的原子操作.
然而共识算法并不能用于所有地方, 其具有很大代价:
- 节点对提议进行投票的过程是一种同步复制. 虽然异步同步会在故障切换时丢失数据, 但数据库通常接受这种风险去换取更好的性能.
- 共识系统需要严格多数来运转. 这意味着, 至少需要三个节点来容忍一个节点失效, 或五个节点来容忍两个节点失效. 若网络故障切断多数节点连接, 则整个系统陷入阻塞.
- 大多数共识算法要求一组固定节点参与投票, 不能随意添加或移除节点. 共识算法的动态成员拓展可允许节点变化, 但十分难以理解.
- 共识系统依赖超时来检测失效的节点. 若网络延迟波动很大, 尤其是地理上散布的系统, 经常发生节点由于网络延迟而错误认为leader已经失效. 虽然这类错误不会破坏安全属性, 但频繁的leader选举会导致性能损失, 系统会花费大量时间选举leader而不是处理请求.
- 有时共识算法对网络问题十分敏感, 以Raft为例, 若整个网络运行正常, 只有某个网络连接不可靠, Raft会陷入leader在两个节点间不断切换的情况, 或当前leader不断被卸任. 应对不可靠网络的共识算法仍是一个开放的研究课题.
4.4 Membership and Coordination Services
ZooKeeper和etcd被描述为"分布式键值存储"或"协调与配置服务". 此类服务的API很像数据库: 向指定key读取和写入值. 那么为何还需要共识算法, 而不是直接使用数据库? 这些服务与数据库有何不同?
这里需要了解ZooKeeper的使用方式, 作为应用开发人员, 通常不会直接使用ZooKeeper, 因为其不适合用作通用数据库. 但很多其他项目依赖它: HBase, Hadoop YARN, OpenStack Nova和Kafka.
ZooKeeper和etcd用于保存少量数据, 这些数据可放入内存, 因此不能将所有数据放这里. 这些数据通过全序广播复制到所有节点上.
ZooKeeper以Google的Chubby锁服务作为原型, 不仅实现了全序广播, 还实现了其他特性, 这些特性在构建分布式系统时十分有用:
- Linearizable atomic operations(线性一致性的原子操作): 使用原子CAS操作实现锁. 若多个节点同时执行相同操作, 只有一个节点会成功. 分布式锁通常作为一个lease(租约), 其拥有一个过期时间, 以便客户端失效时释放.
- Total ordering of operations(操作的全序排序): 当某些资源受到锁或租约的保护时, 需要一个防护令牌来防止客户端在进程暂停的情况下彼此冲突. 每次获得锁, token都会增加. 通过全序化所有操作, ZooKeeper可为每个操作提供一个单调递增的事务ID(zxid)和版本号(cversion).
- Failure detection(失效检测): 客户端会在ZooKeeper维护一个长期会话, 客户端和服务器周期性交换心跳包来检查节点是否存活. 即使连接暂时中断, 或ZooKeeper节点失效, 会话依然有效. 但若心跳停止的时间长于会话的超时设定, ZooKeeper会宣布会话中止, 会话持有的锁也会被释放.
- Change notifications(变更通知): 客户端不仅可以看到另一个客户端创建的锁或值, 还可以观察它们的变化. 因此, 客户端可知道其他客户端何时加入集群(基于客户端写入ZooKeeper的时间), 或失效(会话超时). 通过订阅通知, 客户端不必频繁查询这些变更.
上述所有功能中, 只有线性一致的原子操作真正需要共识. 然而, 这些特性让ZooKeeper之类的系统在分布式协调中十分有用.
4.4.1 Allocating work to nodes
如果有多个进程实例或服务, 其中一个需被选为leader, 则可使用ZooKeeper/Chubby模型. 若节点失效. 其他节点可接管leader身份. 这对于单leader数据库十分有用, 也适用于作业调度程序和状态系统.
当存在一些分区资源(数据库, 消息流, 文件存储, 分布式Actor系统等), 并需决定将哪个分区分配给哪个节点时, 也可使用ZooKeeper/Chubby. 当新节点加入集群时, 为了平衡负载, 需将一些分区从一些节点转移到另一些节点. 当节点被移除或失效时, 其他节点需接管该节点的工作.
上述任务可通过在ZooKeeper中使用原子操作, 临时节点和通知来实现. 若设计妥当, 则应用可自动从故障中恢复. 已经有不少基于ZooKeeper客户端API构建的工具(如Apache Curator), 比从头实现共识算法好很多.
应用最初可能只运行在一个节点上, 但最终会增长到上千个节点. 在这么多节点上进行多数选举十分低效. 相反, ZooKeeper运行在固定数量的节点上(通常是三或五个), 并在这些节点间执行多数投票, 同时支持潜在的大量客户端. 因此, 可将协调节点(共识, 操作顺序, 故障检测)的工作交由ZooKeeper这类外部服务.
通常来说, ZooKeeper管理的数据不会频繁更改. 例如, ZooKeeper中信息可能为: 运行在10.1.1.23上的节点是partition 7的leader, 这类信息可能在几分钟或几小时内发生变化. 但并不用于存储应用的运行时状态, 运行时状态可能每秒变化成千上万次. 若需要将应用的状态从一个节点复制到另一个节点, 可使用其他工具(如Apache BookKeeper).
4.4.2 Service discovery
ZooKeeper, etcd和Consul也常用于service discovery(服务发现, 用于找到某个服务所在的IP地址). 在云数据中心环境中, 虚拟机会被频繁添加或移除, 因此无法事前得知服务的IP地址. 相反, 我们可以让服务启动时在service registry中注册自己的网络端点, 这样就能被其他服务发现.
然而, 服务发现不一定需要共识, DNS就是一种查找服务名的IP地址的传统方法, 其使用多层缓存来实现高性能和可用性. DNS的读取并不是线性一致性的, 因此DNS返回的结果可能是旧值. 如果应用不介意, 则可选择DNS, 其对网络中断有更好的容错.
虽然服务发现不需要共识, 但leader选举需要. 因此, 若共识系统已经知道leader是谁, 那么也可使用这些信息来帮助其他服务发现leader. 一些共识系统支持只读缓存副本, 这些副本异步接受共识算法的所有决定, 但不参与投票. 因此, 这些副本可处理无需线性一致性的读请求.
4.4.3 Membership services
ZooKeeper和其同类服务可看作membership services(成员资格服务)研究的一部分, 其对于构建可靠系统十分重要(如空中交通管制系统).
成员资格服务用于决定某些节点处于活跃状态. 由于网络延迟无上限的属性, 无法可靠地检测到另一个节点是否发生故障; 如果使用共识来检测失效节点, 那么节点可就哪些节点存活, 哪些节点死亡达成一致.
即使节点存活, 该节点也可能被共识错误判定为死亡. 但对于一个系统来说, 明确哪些节点构成了当前成员关系十分重要. 例如, 选择leader可能意味着选择当前成员中编号最小的节点, 若不同节点对成员组成持有不同意见, 则无法选出leader.