Thread Control
1. Thread Limits
The Single UNIX Specification规定了几个关于thread的限制:
| Name of Limit | Description | sysconf Argument |
|---|---|---|
| PTHREAD_DESTRUCTOR_ITERATIONS | maximum number of times an implementation will try to destroy the thread-specific data when a thread exits | _SC_THREAD_DESTRUCTOR_ITERATIONS |
| PTHREAD_KEYS_MAX | maximum number of keys that can be created by a process | _SC_THREAD_KEYS_MAX |
| PTHREAD_STACK_MIN | minimum number of bytes that can be used for a thread’s stack | _SC_THREAD_STACK_MIN |
| PTHREAD_THREADS_MAX | maximum number of threads that can be created in a process | _SC_THREAD_THREADS_MAX |
但UNIX没有统一规定各个参数的具体数值:
| Limit | FreeBSD 8.0 | Linux 3.2.0 | Mac OS X 10.6.8 | Solaris 10 |
|---|---|---|---|---|
| PTHREAD_DESTRUCTOR_ITERATIONS | 4 | 4 | 4 | no limit |
| PTHREAD_KEYS_MAX | 256 | 1024 | 512 | no limit |
| PTHREAD_STACK_MIN | 2048 | 16384 | 8192 | 8192 |
| PTHREAD_THREADS_MAX | no limit | no limit | no limit | no limit |
2. Thread Attributes
Pthread interface允许我们通过不同的参数来规范pthread和synchronization object(包含mutex, rwlock, condition variable和barrier)的行为. Pthread interface有以下同性:
- 每个synchronization object都有自己的attribute object类型. 每个attribute object都可表示多个属性. thread上的程序无法知晓其attribute object, 且thread只能通过pthread函数来操作attribute object
- Synchronization objectd的initialization function可设置其attribute object为默认值(设为null即可))
- 每个attribute object也有其负责析构的function, 会销毁initialization function申请的所有资源
- 每个attribute object都有一个get function和set function, 用于获取或设置attribute object中的属性
|
pthread attribute object有四个属性, 且有对应的get和set function
2.1 detachstate
若创造thread时已确定不需要其termination status, 则可通过设置detachstate来实现新建thread分离出去并单独运行.
|
2.2 stackaddr, stacksize
每个thread都有一个stack, 在创建thread时, 其stack的大小就被确定下来. attribute object可通过stacksize开调整stack的地址和大小
|
一般情况下不需要调用这两个函数, UNIX会自动分配好所需的内存. 除非需要指定某块内存作为thread的stack. 当调用pthread_attr_setstack()后, 程序会接管stack的管理权, 因此guard size也需要程序自行设置, 必要时还需要设置guard area, 所以应避免使用该函数.
|
上述两个函数可在不修改stackaddr的基础上获取或设置stacksize, 但需要注意两点:
- 设置的stacksize不可小于PTHREAD_STACK_MIN, 否则返回EINVAL
- 若设置的stacksize不为STACK_ALIGN的倍数, UNIX则会向上取整至STACK_ALIGN的倍数
2.3 guardsize
当thread发生stack overflow后, guard area会作为一块buffer来保存变量.
|
guardsize会向上取整到memory page的整数倍. 若guardsize为0, 则不需要缓存数据. 若数据已经写满stack并写入guard area后, thread会受到SIGSEGV signal.
3. Synchronization Attributes
3.1 Mutex Attributes
|
mutex attribute有三个属性:
- process-shared
/**
* @brief store the value of the process-shared attribute
* from the attributes object referenced by attr
*/
int pthread_mutexattr_getpshared(const pthread_mutexattr_t *attr,
int *pshared);
/**
* @brief set the process-shared attribute in an initialized
* attributes object referenced by attr
* @param pshared: shall be one of the following values
* 1. PTHREAD_PROCESS_SHARED: mutex shall be operated
* upon by any thread in any process
* 2. PTHREAD_PROCESS_PRIVATE: mutex shall only be
* operated upon by threads created within the
* same process
*/
int pthread_mutexattr_setpshared(pthread_mutexattr_t *attr,
int pshared); - robust
/**
* @brief store the value of the robust attribute of the
* mutex attribute object referred to by attr in
* robust
*/
int pthread_mutexattr_getrobust(const pthread_mutexattr_t *attr,
int *robust);
/**
* @brief set the value of the robust attribute of the mutex
* attribute object referred to by attr to the value
* specified in robust
* @param robust: shall be one of the following values
* 1. PTHREAD_MUTEX_STALLED: default value. If owner
* dies without unlocking it, the mutex remains
* locked and other threads will block
* 2. PTHREAD_MUTEX_ROBUST: If owner dies without
* unlocking it, any attempts to call
* pthread_mutex_lock() will succeed and return
* EOWNERDEAD to indicate that the mutex is in an
* inconsistent state
*/
int pthread_mutexattr_setrobust(pthread_mutexattr_t *attr,
int robust);
/**
* @brief make a robust mutex consistent if it is in an
* inconsistent state. A mutex can be left in an
* inconsistent state if its owner terminates while
* holding the mutex
*/
int pthread_mutex_consistent(pthread_mutex_t * mutex); - type
/**
* @brief store the value of type attribute of the mutex
* attribute object referred to by attr in *type
*/
int pthread_mutexattr_gettype(const pthread_mutexattr_t *attr,
int *type);
/**
* @brief set the value of the type attribute of the mutex
* attribute
* @param type: shall be one of the following values
* 1. PTHREAD_MUTEX_NORMAL: does not detect deadlock
* 2. PTHREAD_MUTEX_ERRORCHECK: provides error
* checking. It shall return an error if relock a
* mutex or unlock an unlocked mutex
* 3. PTHREAD_MUTEX_RECURSIVE: allows the same thread
* to lock it multiple times without first
* unlocking it
* 4. PTHREAD_MUTEX_DEFAULT: recursively lock a mutex
* or unlock an unlocked mutex results in undefined
* behavior. An implementation may map this mutex
* to one of the other mutex types
*/
int pthread_mutexattr_settype(pthread_mutexattr_t *attr, int type);
3.2 Reader-Writer Lock Attributes
|
Reader-writer lock attribute只有一个属性: process-shared
|
3.3 Condition Variable Attributes
|
Condition variable attribute有两个属性:
- process-shared
/**
* @brief store the value of the process-shared attribute
* from the attribute object referenced by attr
*/
int pthread_condattr_getpshared(const pthread_condattr_t *attr,
int *pshared);
/**
* @brief set the process-shared attribute in an attributes
* object referenced by attr
* @pshared: same as pthread_mutexattr_setpshared()
*/
int pthread_condattr_setpshared(pthread_conda *attr, int pshared); - clock ID
/**
* @brief store the value of the clock attribute from the
* attribute object referenced by attr
*/
int pthread_condattr_getclock(const pthread_condattr_t *attr,
clockid_t *clock_id);
/**
* @brief set the clock id attribute in an attributes object
* referenced by attr
* @param clock_id: used for pthread_cond_timedwait()
*/
int pthread_condattr_setclock(pthread_condattr_t *attr,
clockid_t clock_id);
3.4 Barrier Attribute
|
Barrier attribute只有一个属性: process-shared
|
4. Reentrancy
POSIX.1规定了一套符合thread-safe的方式来管理FILE对象: 使用flockfile()或ftrylockfile()来为FILE对象加锁, 文件操作完毕后调用funlockfile()解锁
|
Standard I/O函数在被调用时会自行获得锁, 从而保证thread-safe. 但多次调用getchar()和putchar()会导致时间大量浪费在锁操作上. 为避免不必要的多次加锁, 可使用非加锁的character-at-a-time I/O函数:
|
上述4个函数在调用前必须调用flockfile()保证thread-safe, 完毕后要调用funlockfile()解锁.
5. Thread-Specific Data
Thread-specific data用于存储和寻找特定线程相关的数据, 数据与特定线程绑定后, 数据就不再拥有同步问题, 因为该数据不与其他线程共享.
尽管原则上thread-specific data上的数据不可被其他线程访问, 但由于单个进程下的所有线程共享内存空间, 所以若其他线程得知thread-specific data的内存地址, 则还是可以访问. Pthread使用key, value对应关系模型将thread-specific与一个共享的key结合在一起.
|
虽然pthread_key_create()创建的key可被所有thread使用, 但每个key所对应的thread-specific data因所处线程不同而不同. 若某线程拥有所有key且每个key都有自己的destructor, 当线程退出时destructor的调用顺序以系统实现而准.
为防止多个线程调用pthread_key_create()导致单个key不断被初始化, Pthread提供pthread_once()来保证单个key只会被初始化一次.
|
Key创建完毕后可将其与thread-specific data绑定:
|
6. Cancel Options
Pthread的线程还有另外两个属性: cancelability state, cancelability type. 这两个属性会影响pthread_cancel()的行为.
cancelability state
/**
* @brief set the cancelability state of the calling thread
* to the value given in state
* @param state: shall be one of the following values:
* 1. PTHREAD_CANCEL_ENABLE: The thread is cancelable
* 2. PTHREAD_CANCEL_DISABLE: The thread is not
* cancelable. A call to pthread_cancel() will not
* kill the thread, the cancellation request remains
* pending until the cancelability state is enabled
* @param oldstate: The previous cancelability state of the
* thread
*/
int pthread_setcancelstate(int state, int *oldstate);POSIX.1规定cancellation point只会在以下函数被调用时发生:
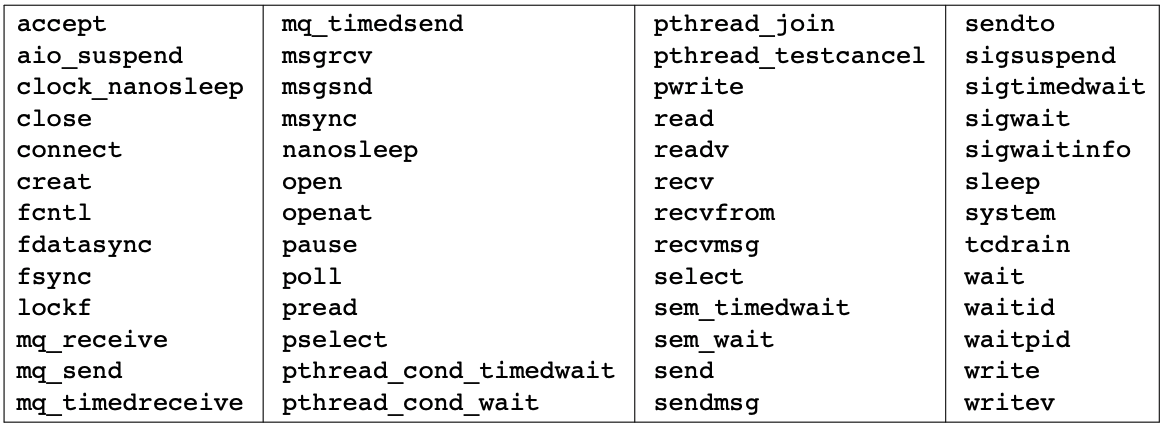
cancelability type
/**
* @brief set the cancelability type of the calling thread to
* the value given in type
* @param type: shall be one of the following values:
* 1. PTHREAD_CANCEL_DEFERRED: keep the cancellation
* request pending until the next cancellation point
* 2. PTHREAD_CANCEL_ASYNCHRONOUS: cancel the calling
* thread as soon as the cancellation request is
* received
* @param oldtype: The previous cancelability type of the
* thread
*/
int pthread_setcanceltype(int type, int *oldtype);
7. Threads and Signals
每个线程都有自己的signal mask, 但所有线程共享进程的signal handler. 当单个线程block signal后, 其他线程也会屏蔽该signal. Hardware fault引发的signal会发送到引发该错误的线程, 其他原因产生的signal会随机发给一个线程.
sigprocmask()用于进程阻塞signal, 但多线程下调用signpromask()的行为以系统实现而定. POSIX.1提供了以下函数用于线程阻塞signal:
|
线程可调用sigwait()来等待一个或多个signals
|
使用sigwait()时需要注意以下几点:
- 若sigwait()调用前已经有signal处于pending状态, sigwait()直接返回.
- sigwait()返回前会移除所有处于pending状态的signals; 若系统支持queued signals, 则sigwait()只会移除第一个signal, 剩余signal还会留在queue中.
- 调用sigwait()前必须先阻塞signals. sigwait()会自动unblock这些signals并等待其到来. sigwait()返回前会恢复signal mask.
- 若多个线程都调用了sigwait(), signal到来时只有一个线程会被唤醒, 其他线程继续等待.
|
8. Threads and fork
线程调用fork()时会发生两件事:
- 整个进程的内存地址空间都会复制到child process中: child process继承parent process中所有的synchronization object(mutex, rwlock, condition variable)
- child process只会复制一个线程, 也就是parent process中调用fork()的线程: 若child process不打算执行exec, 且存在被其他线程获得的锁, 由于其他线程并未被fork()复制, 被获取的锁将永远被释放, 从而导致死锁
为避免多线程中fork()导致的inconsistent state, POSIX.1提出了以下函数:
|
pthread_atfork()有两种用法:
- prepare()为child process解锁, fork()将无锁状态复制给child process. 创建child process后, parent()再次加锁, 保证parent process中的程序可以正常解锁.
- prepare()中获取所有锁, fork()将所有锁的拥有权复制给child process. 创建child process后, child()负责解锁.
fork()用于多进程, thread用于多线程, 实际编程中不推荐多进程和多线程混用, 容易导致死锁. 以下是pthread_atfork()的缺陷:
- 部分synchronization object不方便重新初始化, 例如: condition variable, barrier
- child process解锁由parent process获取的锁时可能触发error
- Recursive mutex无法被解锁, 因为无法获知加锁次数
- 若child process只允许调用async-signal function, 则child()无法解锁, 因为解锁操作是non-async-signal function
- signal handler中调用fork()导致pthread_atfork()中只能调用async-signal function
9. Threads and I/O
由于线程共享进程中的所有file descriptor, 所以对file descriptor的非原子操作会导致文件操作出错, 例如:
/* Thread A */ |
上述代码中thread A和thread B的交错执行会导致读取位置错误, 因此POSXI.1提出以下函数:
|
移动file offset和读取/写入操作变为原子操作.